Mechanical Obstacle Avoidance System
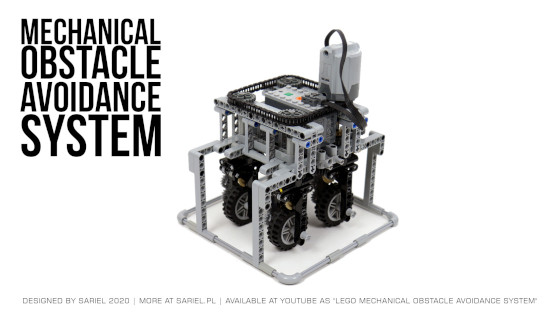 A vehicle capable of changing its direction of movement automatically when encountering an obstacle.
A vehicle capable of changing its direction of movement automatically when encountering an obstacle.
Datasheet:
Completion date: 07/09/2020
Power: electric (Power Functions)
Dimensions: length 19 studs / width 19 studs / height 23 studs
Weight: 0.567 kg
Suspension: none
Propulsion: 1 x PF L motor
Motors: 1 x PF L motor
Having put the LEGO differential to a creative use in my automatic 4-speed transmission, I have come up with yet another idea of using the differential. Watching the Roomba vacuum cleaner, I thought of a vehicle where a single motor would drive the wheels via a differential, so that when the wheels can’t move forward, the differential redirects drive to a steering system and turns the wheels in another direction.
The result was a simple proof-of-concept vehicle with four wheels mounted on four turntables. All wheels were driven by a single PF XL motor mounted above on of the wheels. The motor was driving three of the wheels directly and the fourth wheel via a differential whose casing was driving this wheel’s turntable. All four turntables were synchronized using gear wheels. Thus, if any of the wheels was stopped, the wheel below the differential would stop too, and as a result the differential casing would start to rotate, effectively turning all four turntables. In effect, the differential acted as a load-balancer, turning the wheels towards the direction of the least resistance. It worked well enough, but the model could use a little more polish – it was not always working smoothly because of its center of gravity being closer to one wheel than to three others.
Photos:







Video:
