Mechanical Flip Clock
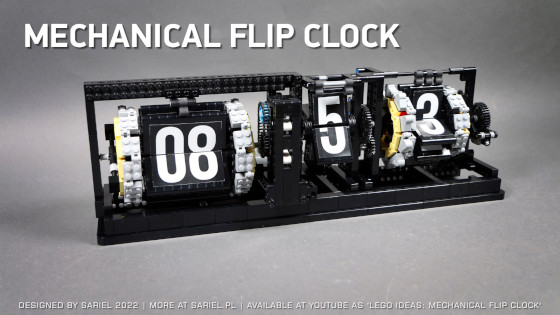 A LEGO Ideas project featuring a mechanically synchronized single-motor-powered flip clock.
A LEGO Ideas project featuring a mechanically synchronized single-motor-powered flip clock.
Datasheet:
Completion date: 26/10/2022
Power: electric (LEGO Power Functions)
Remote control: none
Dimensions: length 55 studs / width 16 studs / height 19 studs
Weight: 1.055 kg
Suspension: none
Propulsion: 1 x 71427c01 motor
Motors: 1 x 71427c01 motor
I’ve always liked flip clocks, but never seen a working one built using LEGO. So when the LEGO 42145 set was released along with a new and unique 5-sided connector, I thought about using it for a 10-sided structure which would enable me to build a LEGO flip clock, or at least a minutes indicator for it. But as I started playing with the idea, I found that I would need at least 4 and ideally 8 such connectors, and that they would result in a bulky structure. So I’ve started playing with Technic bricks and hinges and eventually arrived at forming a regular (and rigid)10-sided and 12-sided polygons using common LEGO pieces.
From there it was a relatively simple to build the entire clock, although I’ve ran into a few unexpected snags along the way. All in all, my goal was to make a fully mechanical clock synchronized using LEGO gear wheels, without using Mindstorms programs and programming and without using more than one motor. I also cared about the sound the clock would make, which is why I’ve picked the old 71427c01 motor to drive it, because it runs quietly compared to most other LEGO motors.
The challenges I’ve run into were:
- driving. I did play with the idea of using a stepper mechanism that would rotate the clock minute by minute, but the flap mechanism doesn’t really need one (it kinda acts as a stepper itself) and the more I played with the clock, the more I liked the idea of a timepiece that runs continuously without any breaks. It sort of made me think of the unrelentingly passing time. Of course, the final clock doesn’t run quite smooth, there’s some jerking motion due to flaps rotating and due to the rocking “:” indicator, but that’s caused by the play in LEGO gears which is quite difficult to mitigate.
- speaking of the rocking “:” indicator, to give it a decent range of motion without using springs or rubber bands I had to balance its weight and angle precisely against the tiny lever that interacts with the minutes rotor to move the indicator. Lots of fine-tuning went into preventing the whole thing from putting too much stress on the rotor while allowing it to move far and with relative smoothness.
- the hours rotor. My initial idea was to split it into two rotos, one digit each, but synchronizing them mechanically proved quite a challenge. In a 12-hours mode one rotor stays as 0 while the other goes from 0 to 9, then the first rotor gets to 1 while the other goes to 0, then 1, then 2 and back to 0 again. In 24-hours mode things get even more complicated. I couldn’t find a way to achieve this kind of pattern mechanically without making it big and without generating a lot of play, so I eventually went with 12 separate flaps on a 12-sided rotor.
- AM/PM indicator was something I’ve considered having decided in a 12-sided hours rotor. But the issue is that it would significantly increase size, complexity and play in the clock while offering little in return (the motion of such an indicator would be too slow for human perception).
- the flaps. For quite a while I was trying to use LEGO 6×4 flags here, but they weigh almost nothing and I found that they can’t rotate under their own weight when inserted between two pins. They sort of worked when only supported on one end and not the other, but it looked awful. So I went with beams instead, which created another problem: the density of flaps. In a real flip clock the flaps are very thin and kept very close together. LEGO beams are 1 studs thick, so keeping them close results in limiting how far they can rotate. This problem is visible in the 10-sided rotor and a little less on the 12-sided one, where the flaps can’t rotate all the way down to the vertical position because of the other flaps. The middle, 6-sided rotor doesn’t have this problem because it has fewer flaps and it shows the numbers vertically, just like a real flip clock.
- finally, the mechanical synchronization. For best accuracy I’ve decided to drive the minutes rotor directly with the motor, the use a 10:1 reduction to drive the tens of minutes rotor from it, and then 12:1 reduction to drive the hours rotor. The two minutes rotors remain perfectly synchronized and work together as they should, but with the hours rotor (which is geared down 120:1 relatively to the first rotor) the play in the LEGO gears begins to show. The hours switch at the right moment only once every 3 to 4 digits, then slow down and switch up to 3 seconds late. There are two pairs of gears between the two minutes rotors and three pairs of gears between the minutes/hours rotors (including the third pair being connected by a chain instead of directly meshed, to keep the hours rotor rotating in the correct direction). I didn’t find any way to reduce the number of gears without resorting to using worm gears (which generate so much friction that accuracy would suffer) or Hailfire Droid wheels (which are enormous and so unique that they don’t really belong in a LEGO Ideas project). It should be noted that I was able to quickly find the best gear combinations for these ratios using my Gears Calculator mobile app.
In the end the clock isn’t too pretty, because I liked the look of the exposed rotors and gear wheels and I didn’t want to hide them inside some enormous box. It’s not too accurate either, because in order to keep things simple I’ve used a regular LEGO motor powered from the LEGO 8878 battery, without any actual time-keeping mechanism, so in the end the clock runs approximately 15% too fast. But I just didn’t think that perfect accuracy would be possible using a motor, because it would depend of factors such as the voltage, the motor wear and possibly even length of the cable between the motor and the battery, and other ways to drive the clock, such as e.g. weighted escapement mechanism, would make the clock much bigger and could only drive it for short periods of time. My focus was on building the rotors and synchronizing them rather than on making sure than 1 second is exactly 1 second. For simplicity I have also omitted seconds from my clock and drove it at such speed as if a minute was just 1 second long. This is a pretty common approach among LEGO clock builders, and the alternative would be to make the whole clock almost twice as big and as complex.







