Liebherr R974 Pneumatic Excavator
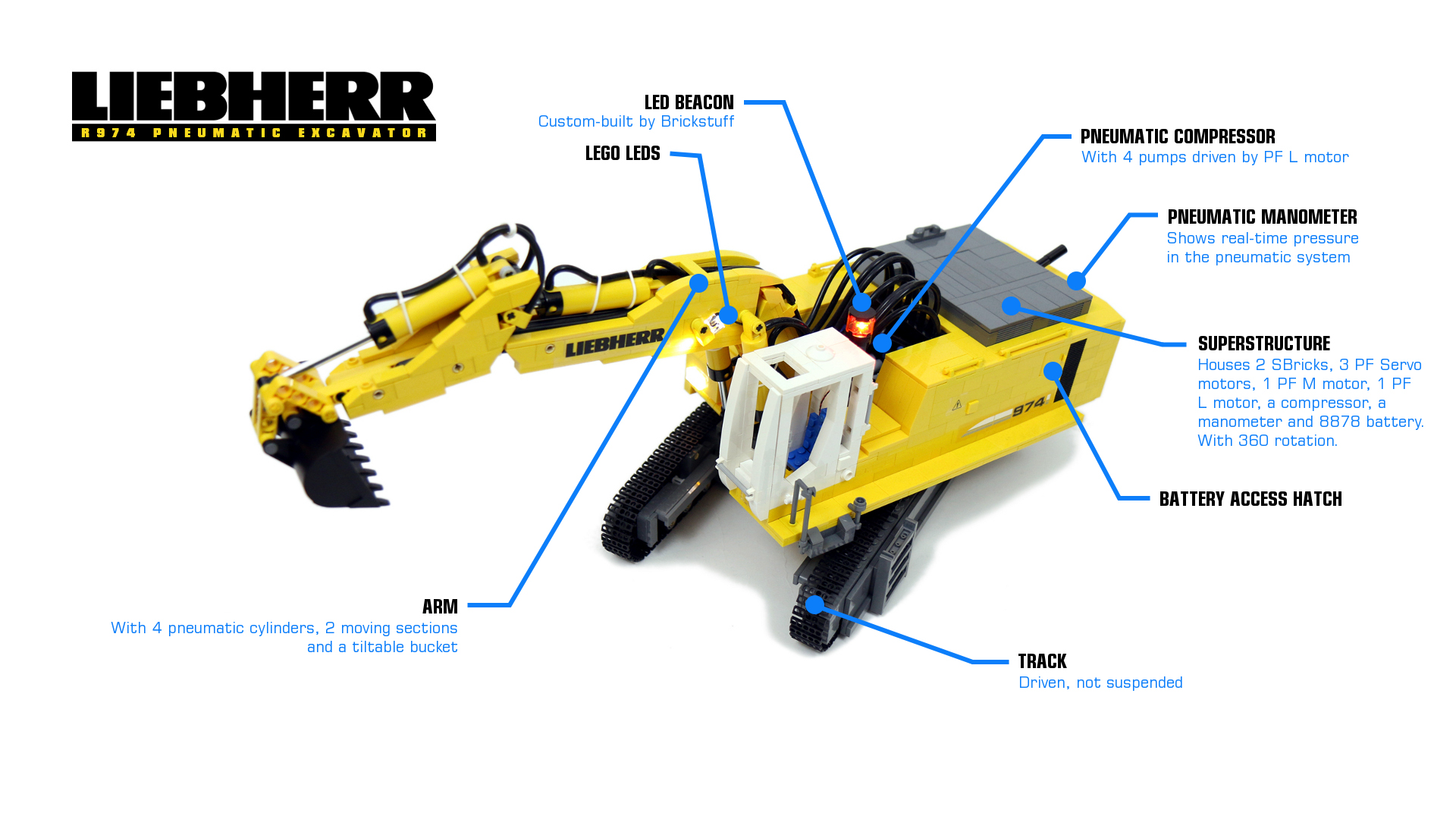
 Model of a Liebherr excavator. Features drive, steering, rotating superstructure, fully remote-controlled pneumatics, a manometer, lights and custom stickers.
Model of a Liebherr excavator. Features drive, steering, rotating superstructure, fully remote-controlled pneumatics, a manometer, lights and custom stickers.
Datasheet:
Completion date: 12/06/2016
Power: electric (Power Functions)
Dimensions: length 549 studs / width 23 studs / height 44 studs
Weight: 1.862 kg
Suspension: none
Propulsion: 2 x PF L motor geared 3.33:1
Motors: 3 x PF L motor, 1 x PF M motor, 3 x PF Servo motor
This model was inspired by a metal model of the Liebherr excavator I got as a gift. It made me realize that I’ve had these new long Lego pneumatic cylinders for a while and haven’t really put them to good use yet. So I did my best to create a Lego version of the metal model, but I’m not particularly happy with the results.
The entire model combined a number of experiments, most of which have failed. The basic goal – making a fully pneumatic excavator with full remote control – was achieved, but along with a couple of shortcomings. The things I consider failures included:
- the compressor. Made with four 6L pumps and driven by a PF XL motor, it simply wasn’t effective enough once connected to the pneumatic system. This was especially apparent with boom’s first section including two large pneumatic cylinders, which moved really sluggishly. The reason is probably complexity of the whole pneumatic system (6 T-pieces) which leaked some air. When comparing it with the performance of the 8868 Lego set, I get the impression that a compressor with fewer pumps but running at significantly higher speed might have been more effective.
- the turntable. I have used the new 60-tooth Technic turntable which is stronger and rotates with less friction than the older ones, but the problem is, it needs to be driven by a bevel gear. The result is significant backlash that makes the superstructure rotate in intermittent motion. A worm gear would work much better, but it’s extremely difficult to mesh this turntable with a worm gear.
- PF L motors inside the chassis’ crossbeam. They work just fine, they are covered up nicely, but they also make the crossbeam look twice too big. The model was also too fast because of insufficient gear reduction, but luckily the speed control with SBricks allowed to mitigate that.
- the pneumatic manometer. It’s a cool feature with no practical use. With the ineffective compressor and leaking pneumatic system there wasn’t much pressure to measure. A manometer would show much more interesting readings when hooked up to a system with an airtank and a pressure switch.
- using a single SBrick’s joystick to control turret rotation and arm elevation was a terrible idea. No matter how careful I was when operating the model, rotating the turret would always affect arm’s elevation.
- the model also suffered from boom that was too short and rear end that is too long. With the boom, I had no idea how to make the cylinders some 3-4 studs longer, so I had to shorten the boom, and with the rear end I would need to remove one PF Servo motor along with a valve to keep it short enough. All in all, the model seemed to suffer from too many mechanisms crammed in a too small package. It was no more than medium-sized and yet it housed 7 motors, several meters of pneumatic tubing and weighs nearly 2 kg. It was also pretty rear-heavy.
The features I liked and was happy with were:
- the boom. It was too short, but it had a pretty realistic range of movement, carefully based on the metal model. It was also built around an inner studless skeleton which was only 2 studs wide, with studfull body added around it just for looks. The resulting arm was only 4 studs wide and the entire stress was handled by the inner skeleton.
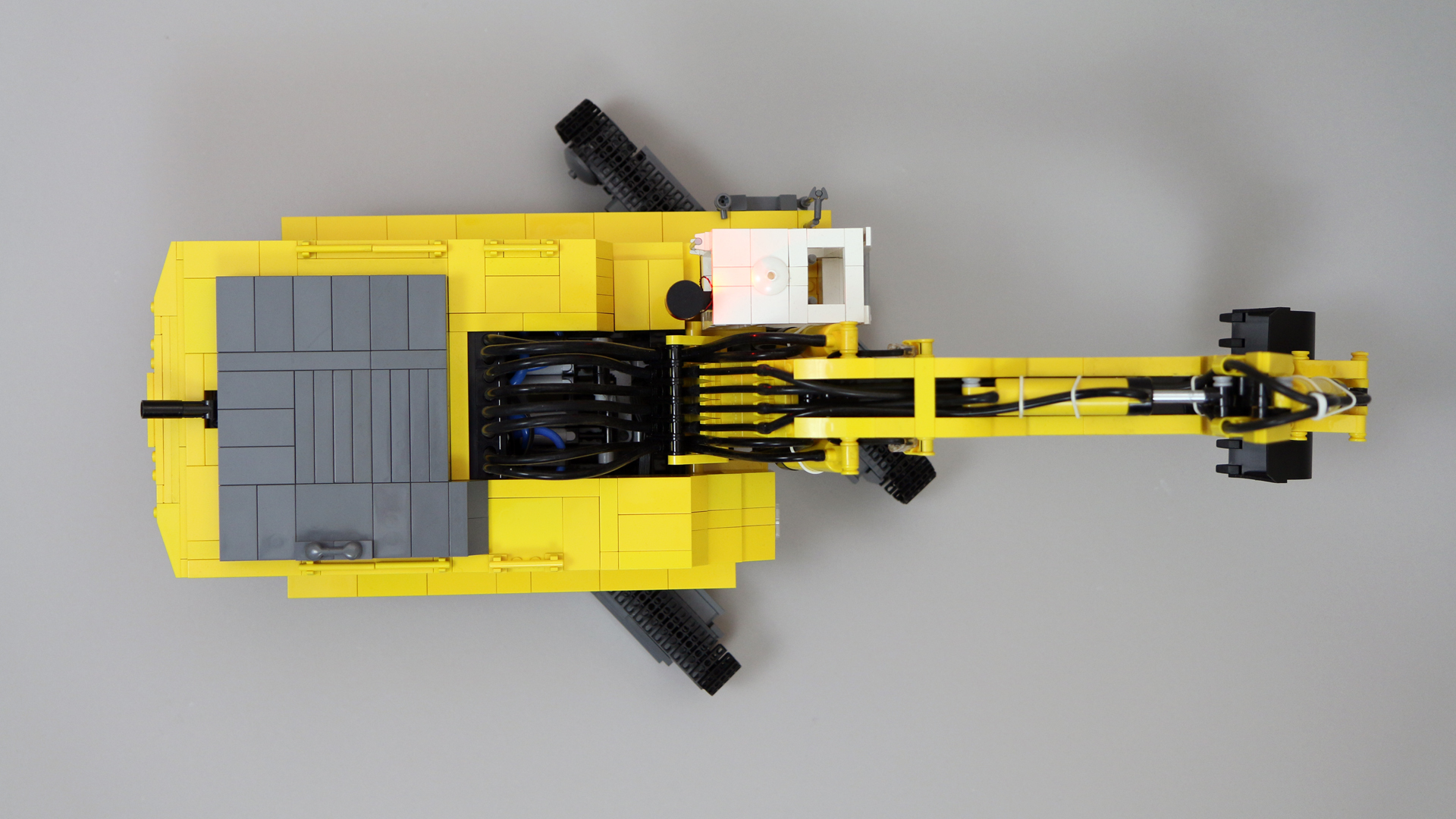
- the pneumatic tubing. The tubing in the 42043 Lego set’s pneumatic crane is a real eyesore to me, so I did my best to keep it nice and tidy in my model. I have used a number of small Lego rubber bands, putting them around the cylinders and around the boom’s skeleton and inside the boom as well. I have also tried to recreate the tubing connecting the boom to the superstructure, which didn’t turn out so neat in the end, partially because there were 8 hoses that needed to go through a 6-studs-wide space.
- the custom LED beacon by Brickstuff. It was beautiful and made the model look much better and more realistic, and I was even happier because I had some input into its design.
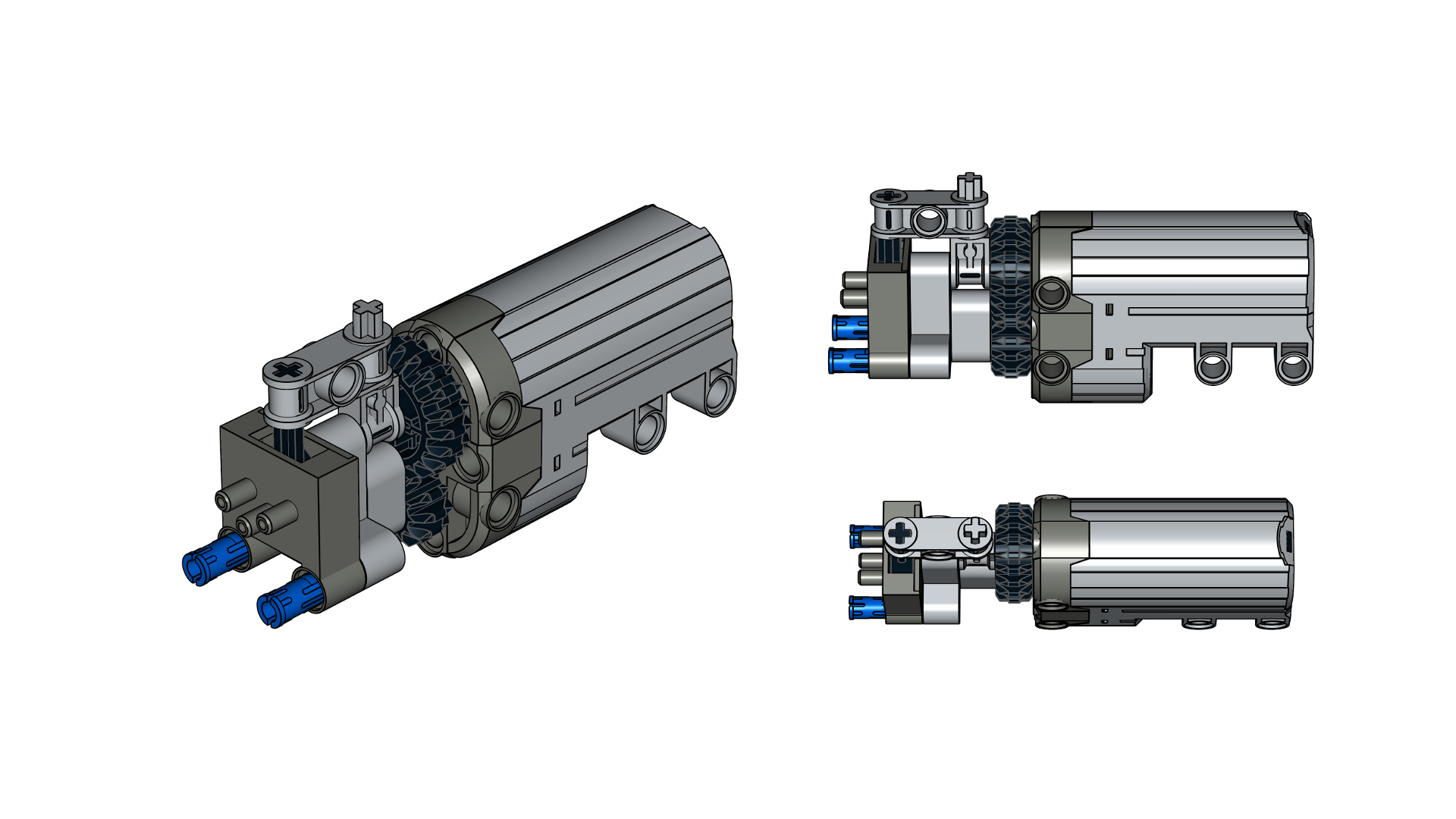
- the accuracy of pneumatics. Thanks to PF Servo motors granting me complete control of the pneumatic valves and to the compressor running only when a button was pressed, I could control the boom remotely with accuracy that seemed even better than if I was operating the valves manually.
- the look of the superstructure. Given that the superstructure’s body was literally bursting apart from all the wires and tubing, I think it was neat enough. I really had to cram an incredible amount of stuff inside. Having the accurate metal model was very helpful, as it allowed me to see much more than I would see from the blueprints alone – for instance, where exactly is the boom connected to the superstructure. Even given all the many flaws of this model, I consider it my most accurate excavator up to date, both technically and aesthetically.
In the end, it was not a very good model but it was a very good lesson.