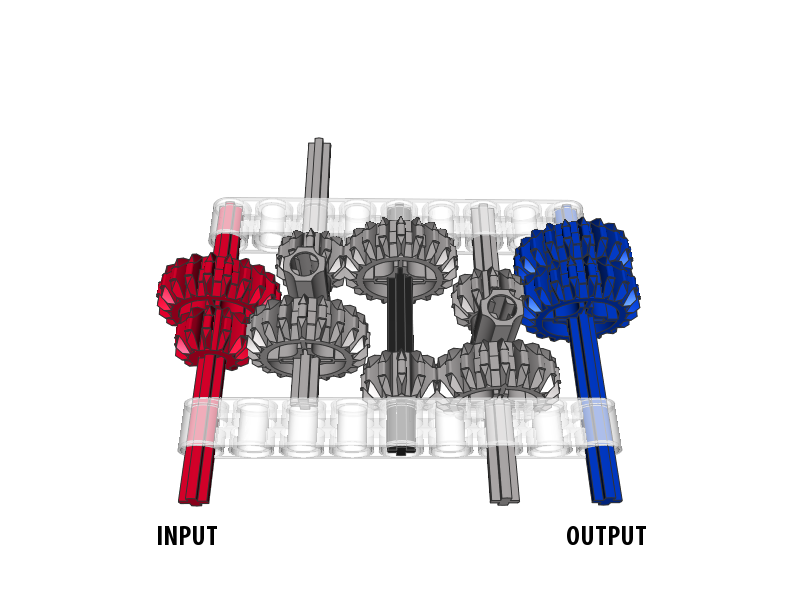
4-speed Compact Linear Gearbox

Compact gearbox design, with two linear shifters, fixed input and output shafts, and large span of gear ratios provided.
This particular idea started with the Truck Trial vehicles in mind. As the trucks used in the Polish Truck Trial are being constantly developed, more and more of them became equipped with simple gearboxes. Such vehicles have the obvious advantage of being able to adapt their drivetrain’s gear ratio to the requirements of the track, sacrificing speed when more torque is needed and gaining extra speed when less torque is needed. Developing a gearbox that would last through a Truck Trial race is quite a challenge, which is why gearboxes only became popular recently.
Aside from highly experimental or lightweight vehicles, all gearboxes currently used in our races are linear gearboxes. There are two reasons for this: firstly, a linear gearbox usually has more compact and thus more robust structure, and secondly the transmission driving rings used in more sophisticated Lego gearboxes are much less torque-resistant than the gear wheels are. Since linear gearboxes only use gear wheels, no transmission driving rings at all, this problem is eliminated. Additionally, with very simple, usually 2-speed linear gearboxes the shifting mechanism is typically very simple too, making the general complexity level of such a gearbox fairly low.
As Truck Trial races involve a significant torque to be handled, the gearboxes are made as simple and robust as possible, rarely using more than 2 speeds. We stick to the rule than any mechanism can be complex or robust, but not both – and it works very well for the Truck Trial constructions. Even a gearbox with just two gears is quite an advantage; a vehicle that can gain extra torque to drive uphill and extra speed to drive downhill will always beat the one that has no gearbox and drives at constant torque and speed. Since the amount of torque required to overcome any given obstacle is more or less the same for every truck, the gearbox-equipped trucks win by simply jumping to high gear and driving faster whenever possible.
There are two basic problems involved when building a torque-resistant linear gearbox: the choice of the gear wheels that will engage and disengage, and the length of the axles that will transfer the drive. As for the first problem, the double bevel gears are a very common choice because the shape of their teeth makes them engage and disengage easily, and also because they are strong (the smallest double bevel gear wheel, the 12-teeth one, is many times stronger that the smallest regular gear wheel, the 8-teeth one). As for the latter problem, the solution is simple: the axles have to be as short as possible and reinforced in as many places as possible to prevent them from bending under torque. Additional protection from the torque for the gearboxes is achieved by using gear reduction between the gearbox and the wheels. Thus a gearbox is placed directly on the drive motor’s output shaft, and it only handles motor’s nominal torque, not the torque multiplied by the gear reduction.
With this said, I started to work on a gearbox for my next Truck Trial vehicle. I wanted it to have fixed input and output shaft, with the only moving elements located somewhere between, to eliminate possible weak points. It meant that I had to use separate shifter axles. Moreover, to keep the axles short I had to keep the moving by a single stud only, so a single shifter axle could only provide two gears. That’s why I used two shifter axles, looking for a gearbox that would provide at least three gears.
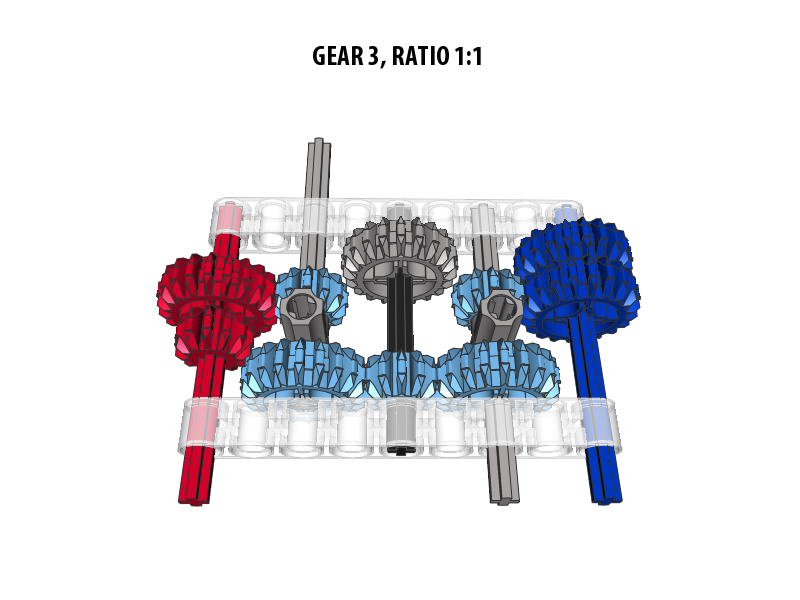
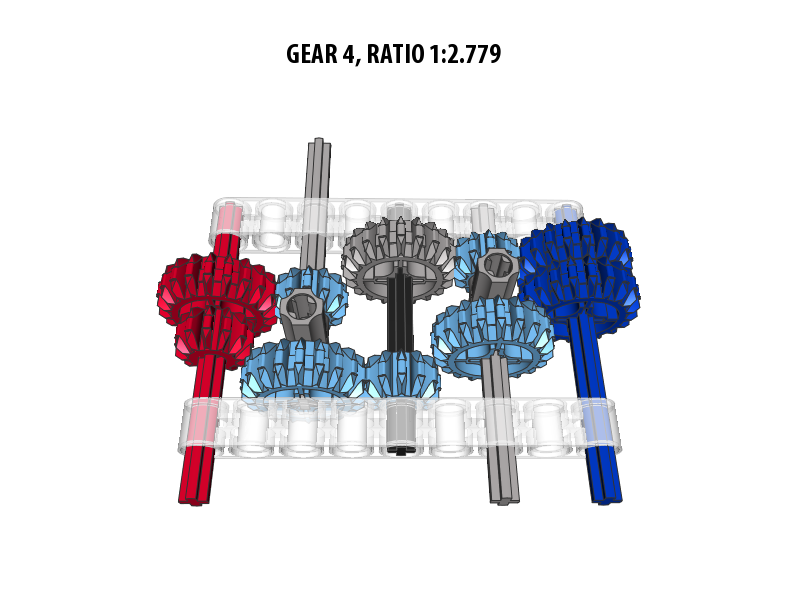
The resulting gearbox was supposed to be mounted vertically, but is shown laid on a side in the pictures and video in order to show its internals better. First video shows bare gearbox and its construction, while the second one shows a version with remote-control already integrated into it, and reinforced adequately. The gearbox provides a wide span of gear ratios, from nearly 8:1 reduction to nearly 1:3 overdrive. It is reasonably small and can shift from any gear to any other gear. Unfortunately it needs two separate motors for remote control and has a rather unusual switching pattern. As shown in the videos, the shifting time is reduced to as short as possible in order to make the gears engage and disengage seamlessly every time.
Eventually, I kept this gearbox for practical testing in some more ordinary vehicle and choose a much simpler 2-speed one for my Trial Truck. I do, however, find it very useful and convenient to control remotely, and I will certainly look for more than just one opportunity to use it in my future models, most likely some at least medium-sized trucks. If it proves successful, it may very well be installed on a Truck Trial vehicle, as intended from the beginning.
Photos:



Videos:

sup paul and u just made my day ive finish building a engien set but i was kinda sad of no dearbox but thx to u now my engine set is a total complete set
Problem is that this kind of stepper only works in one way. And I’ll need to shift gears down as well.
I had studied the BS pics of Sheepo numerous times; yesterday is the first time I have begun to understand the shift mechanism. It could be driven by a knob wheel as you suggest in another way. On the other hand, a beam could also be pressed simultaniously on two knobs… that way it could work in both directions…maybe driven by a clutch gear and worm connected to a medium PF…
Only question is than how to make a quarter turn of the know wheel convert in a 8mm shift of the gears. 8mm is equal to 2,5 teeth. Time for some math….
@Sander
You could try mounting a knob gear on motor’s output and adding a beam that will be pressed to the knob gear by a rubber band. Do it right, and it will work like a stepper motor. Also, I think I’ve seen Sheepo’s gearbox in detail at Brickshelf.
Hi Paul,
As Sheepo won’t unveil is secrets, I try your LEGO-wisdom…;-)
I’m rebuilding my Merc Gelandewagen gearbox from 4 to 5 speed. No worries, great stuff, but the shifting mechanism is ‘analogue’ thus making it possible to let the gears only be meshed for a small part of the gear instead of a full mesh. This could be solved by using a sort of stepper motor (just like sheepo, or a NXT device which I don’t have). But how? Have you got any clue on how toe build one in a compact way?
Another awsome build Sariel!
🙂
@Rochan
There probably is. Try to find out yourself.
@Sariel
I don’t have those technic motors.But I have those lego Mindstorms servo motors and I have only 3 of them. Is there any way to use all three including the gear stuff.
@Rochan
Not directly, you have to go through speeds in between first.
Is it possible to switch form 1 to 3 or 2 to 4 ?
i finished the model i was working on with this gearbox in it, and the performance was way below my expectations. even though you have said it can handle huge torque, it tends to strain the motors (two pf xl) when taking off, even in first gear. this might have something to do with the fact that there is no external gear reduction, but i wanted it to be fast. the ratios are also too far apart for a gearbox with four speeds in my opinion. the final model is around 1kg (i didnt worry about aesthetics, i wanted it to be lightweight) and the model drives okay in first and second gear, but the motors strain in third and grind the gears in fourth. the linear actuator shifting mechanism was too slow to change gears without them grinding, even when geared up as high as 1:5, so i dont know if the model would have accelerated in higher gears from the speed the lower gears provide or not. the speed of the model also fluctuates, i.e. the motors strain, then the vehicle lurches forward a foot and then strains the motors again. this might be because of the three knob wheels i have in a row in the rear axle.
i tried replacing the three 24 tooth gears that couple the motors together with two 12 tooth gears and a 36 tooth one, for 3:1 external gear reduction, but the gears slipped more, i think that this was because there was more torque on the gears in the gearbox.
overall, the gearbox works well if it is well reinforced and has some good external gear reduction, but i would prefer a driving-ring-style gearbox as the ratios in them are more close together.
@qwertyuiop
Well, I suppose they could be a little slow.
i would but i dont have any…yet
@qwertyuiop
Why don’t you just try and see for yourself?
would a linear actuator geared up 1:3 (powered by a medium motor) be fast enough to switch gears without them grinding?
@qwertyuiop
It would work even if you had a dozen of them stuck together.
honestly, it would work, right? if you had the two remotes stuck together?
@qwertyuiop
The universe would explode, probably.
what if you used two remotes and two receivers, having one remote and receiver for steering and acceleration, and the other remote and receiver for changing gears?
@Ruben wynia
No, I don’t.
but that is whit 2 gears. and i have made but its broken again. i want a 3 or 4 speed automatic. i have look on lpe power and the have a gearbox but i don’t have the stuff. do you have a automatic gearbox wit 3 or 4 gears????
@Ruben wynia
There is an automatic gearbox in my Ideas category.
hi, i am ruben. i am 12 years old and fan of lego technic. but i have a problem. i want to make a 3 speed automatic gearbox. but i don’t no how it works. i have made a 2 speed autmatic gearbox but its broken. maby you can show it in a video. bye
srry for my bad english
@mescalinum
No, I don’t think it would.
cool! wouldn’t this be useful for a 2 motor 4-way router/multiplexer?
when being short for motors, that would be a lifesaver!
it may not be practical for TT but it’s more thank practical for mobile cranes, machinery and other models, it’s not restricted only to TT he said so himself in the end of the post that with the TT he’ll go with a simpler 2 speed gearbox, and i’ve seen some models that the gearbox did a good job even though it’s not RC as you’ve said, don’t knock it until you try it
@Clement
I feel the same about your comment.
Hi Sariel,
Nice (and long) article. Btw, you should have listed all 4 gear ratios as text, not only in pictures 😉
ok, this is a good idea, but it is “only” a 2speed linear gearbox extended : nothing new. Moreover, and this depends only on the gears used, the gear ratios are … hum. From 7 to 2.7 ? And then, 1 and 1/2.3 ? Well, this is only my opinion.
Shifting levers is already hard with a 2speed gearbox, but 2 levers ? If you need to change them at one point at the same time ? No applicable way, or maybe only with NXT motors, and not uder a lot of torque.
But in TT, you don’t really need 4 speeds, do you ? Even a 2 speed, you loose almost all of your inertia because legos are only plastic toys and not RC vehicules. Sorry, but I think your gearbox is only theorical.
Last thing : using M motors in such a way ? Please, it hurts to see them bleed …
PS : too much text, didn’t read it all.
Other solutions… You made me laugh.
to spoko.
@kopia
Widziałem, zgłosiłem ją administracji. Niewiele więcej mogę zrobić.
widziałes kopie tej skrzyni biegów
LINK: http://www.spryciarze.pl/zobacz/jak-zrobic-4-biegowa-skrzynie-biegow-z-lego
I built once a 3-speed gearbox like this and in my gearbox, gears liked to slip on axles while shifting gears under torque (direct from pf xl), so i find gearboxes that uses driving rings more useful.
@Deco14.91
according to his FAQ, he uses LDraw for the rendering
Great invention, but i have a question about other topic. which software do you use for your graphics? because I use MLCAD and the quality of the graphics are not as good as yours. And if it not too much trouble could you give me a link to download it. Thanks a lot and again good invention.
hy!!
cool gearbox!!!
there is just a fault in the last pictuzre of the blue gears(excuseme my nglish isnt very good…)
simon
@Rodrigo
It sounds like you don’t know how to use gears, Rodrigo. In this case, read this and you will have answers for all your questions: http://sariel.pl/2009/09/gears-tutorial/
Hi Sariel . Congratulattions for this new gaer box .
I am build a model based on your Wrangler Rubicon ( 20 % complete) and i will try to use this gearbox on my model. I will sent photos to you , when the project will be finishead.
But i have some doubts. I aprecciate if you can help me to solve them …:
1) This gears can improve the load/power/force of one XL motor ?
2 )This gears can improve de maximum speed of the car ?
3) If i have two car , and both oh them are the same . In one i have a XL motor and this gears , and in another only a xl motor. who will be more fast ? and more strong ?
Thanks !!
Bye
I never though a 4 speed gear box could be this simple… well, I don’t know much about gear boxes anyway eheh but I have seen things much more complex than this that do the same job (I know the speed/torque might be different from one to the others)
Anyway, and talking about gears, I came up with a gear set that is so “strong” that I simply can’t turn it; I tried with bare hands, not with PF motor, but I think that with the motor it won’t turn anyway, because it generates so much torque (?) that the bricks simply start bending, eventually to the point of breaking (the bricks, the motor, or both).
I would like to send you a draw of the set (paint skills ;)) so you can take a look and try to find a way to make it turn…
Once again, nice work you have there on the gear box… and in the other projects as well.
Peace!!
@nico71
Yes, I agree about the excavator and the Rubicon. I have better MOCs and worse MOCs, like any builder, and I’m probably not good at building excavators anyway. As for spending time, I usually write in the Internet when I’m out of home and I have no access to my Lego bricks. But yes, I wish I had much more time.
@Sariel
Yes I agree, but you spend time with it, I don’t know if your have enought time but with your facebook and your website you are always connected, not only on your lego creations, what a pity. For the unfinished creations, I talk about the rubicon and the excavator.
@nico71
Some people will only need a photo and a single sentence to grasp it, but others will keep asking me to explain. So, I’d rather explain too much than too little, especially since reading doesn’t hurt 😉 Besides, this gearbox was designed with Truck Trial in mind, and since I know that many people are interested in this sport, I took the chance to explain how gearboxes are used in Truck Trial here, among our drivers.
On another note, I don’t see how is this creation ‘unfinished’. I mean, it even has two videos, with bare version and with remote-controlled version. My previous creation, the racing Scania was far from ‘unfinished’ too, I believe.
As usual, that is a good stuff but I think you intellectualize very much your work. I mean, it’s a simple gearbox with a special functionning, I don’t think people need 800 words to understand it. With some sentence and picture, people understand, no popularization needed. You had better to yield some ground, because I notice that your creations are not as finished as the before, maybe because you spend a lot of time on writting on facebook or on your webiste. In any case, it’s just my opinion 🙂
@charles
Not sure, but you surely can add a reverse/forward switch mechanism as an add-on to the gearbox.
is there a reverse possible becuz I use an pneumatic instead of an electric motor (I build HUGE ships (1.5-3 m long)) ?
ps: is it posible with large gears?
hee hee hee, i managed to make a version of this gearbox that would only require one motor to operate. will try to intergrate into trial truck
@NxT bUiLdEr
What’s the point of adding a reverse when you can just switch motor to run backwards? You get 4 speeds forward, 4 speeds backward, depending on how you switch the motor, why would you bother adding reverse to the gearbox?
have you thought of adding a reverse? that would finish it off 🙂
Well, I’m just trying to really compete against my TrTr-oriented friends this season. The previous season, I totally let it go.
@Sariel
Yup.. I know the driving rings have a huge backlash, so driving power would probably damage them if the vehicle is too heavy.
I’m curious what vehicles you’ll use the new 4-speed in, and of the results. I just wonder how you guys could build such sophisticated trucks if Lego wouldn’t have come out with the double bevel gears.. 😉
I just read one of the older posts the other day, and there you wrote you’re not much interested in TrTr.. Times are a’ changin’ …. haha 😀
1. How much load is put on the motor depends on what you use this gearbox for. Also, various types of motors can handle various amount of load.
2. There’s no way to build an efficient flywheel at this scale. It would have to be either very large or very heavy (I mean heavier than regular Lego parts, it would probably have to be solid metal), and still it wouldn’t really have time to save momentum as shifting to other gear takes only fractions of seconds. So, it’s much better to keep shifting time short than to add a new element of doubtful efficiency.
3. This gearbox was designed to handle huge torque. How big model can it handle exactly depends on a whole list of thing, including the weight of the model, the speed you want it to achieve, the size of drive wheels, the gear reduction outside of the gearbox and the nominal torque of the drive motor(s).
This is a very neat idea! Questions: doesn’t it put too much load on the motor when in highest gear, first you gear up, then you gear down to get the desired ratio?
Also, wouldn’t you benefit of using a flywheel, to keep momentum while shifting? (this is for normal, driving ring-type gearboxes.)
Could for example the 4-speed compact gearbox you made handle a model as big as the Dodge (or the Lambo, for that matter)?
I’m not sure. I should be able to fit it between the stringers, but then the remote-control mechanics would occupy a good portion of the cabin.
Very interesting! Are you planning on dropping it into your upcoming Dodge Charger as a “Four on the Floor” gearbox? 🙂