Caterpillar D9T

Model of a Caterpillar tracked dozer. Features remotely controlled drive, steering, blade and ripper.
Datasheet:
Completion date: 09/05/2009
Power: electric (Power Functions)
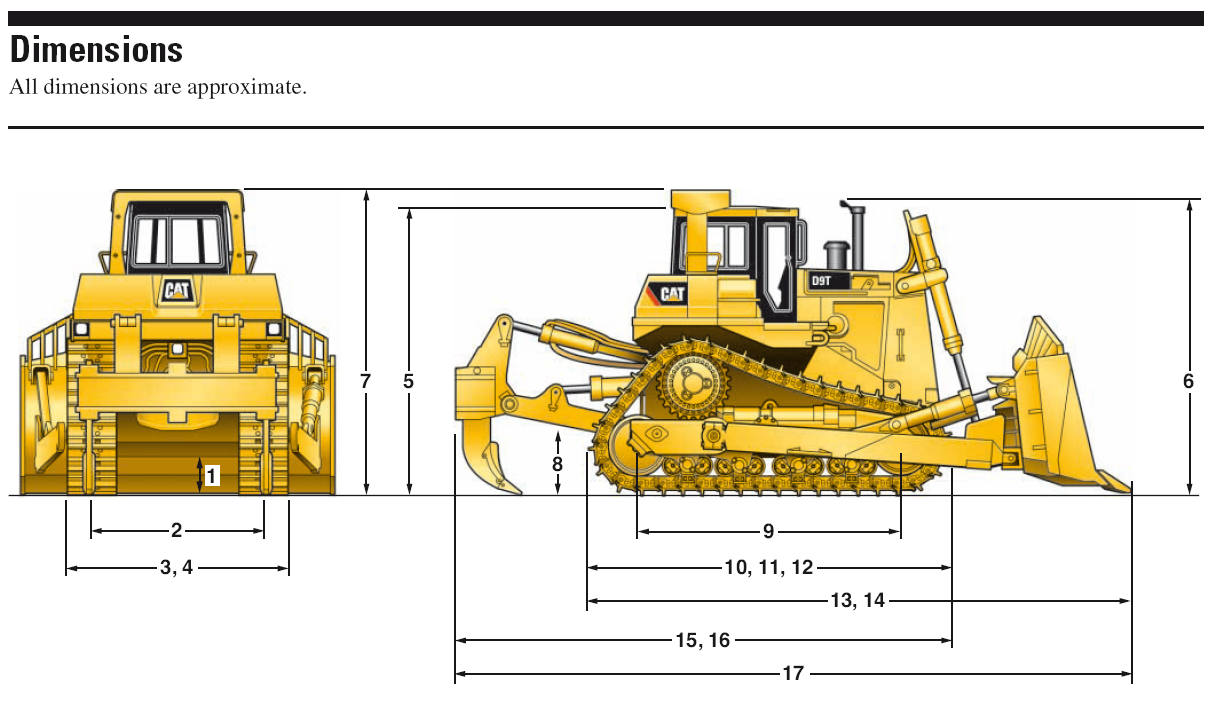
Dimensions: length 50 studs / width 26 studs / height 25 studs
Weight: 1.56 kg
Suspension: none
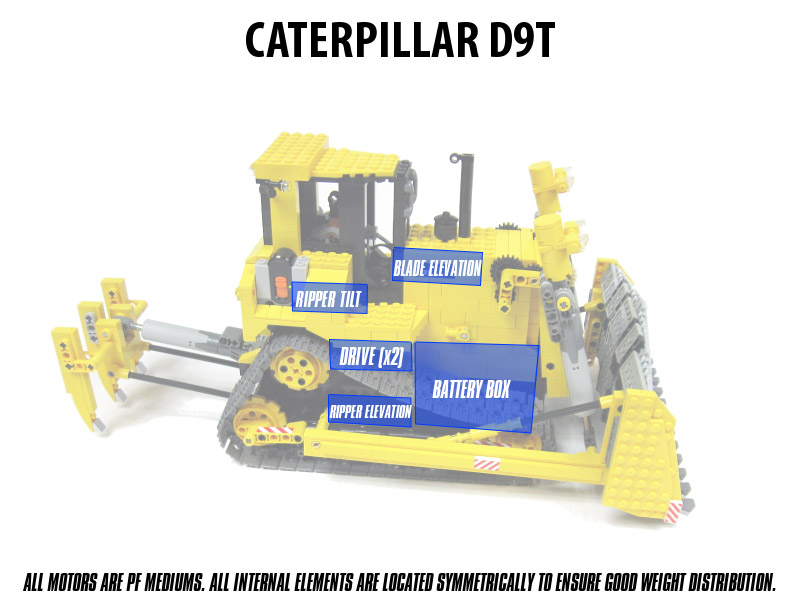
Motors: 5 x PF Medium
I was interested in the unusual Caterpillar tracked dozers for some time, but I couldn’t build such a dozer earlier because the triangular shape of tracks required 6 sprocket wheels and I only had 4. Having finally acquired the missing 2 wheels, I proceeded with the construction right away.
Nowadays, when one builds a yellow tracked dozer it will be obviously compared to the famous Lego 8275 set. Since it was clear from the beginning that my model would be significantly smaller, it was my goal to include in it more functions than the 8275 had, and thus surpass it in terms of functionality.
The basic difficulty is that the Caterpillar tracked dozers are unusually narrow – the width of the hull is only slightly greater that the width of a single track. When I calculated dimensions of model with the new tracks system which are 5 studs wide, it turned out that the hull will be just 6 studs wide. It happened to be just the minimal possible size to house a battery box and several motors inside. Since with the coming of the new 8879 speed control enabled handset the subtractors have become obsolete, the model was supposed to be driven by two identical motors located side-to-side. With the hull just 6 studs wide the only possible choice were the PF Medium motors, and they turned out to be a fortunate one. However, to make them fit in the hull it was necessary to make openings in its sides, so that the motors actually traverse through it.

Another difficulty is the layout of the tracks: they have contact with the ground at a relatively long area, yet they are just 6 studs apart from each other. It makes the model’s weight distribution crucial for its handling. Hence the entire model is built in a perfectly symmetrical way, both externally and internally, with the only exception of bevel gears at the linear actuators and the on/off switch. Placement of the battery box low between the front part of the tracks was a second factor that contributed to the proper weight distribution.
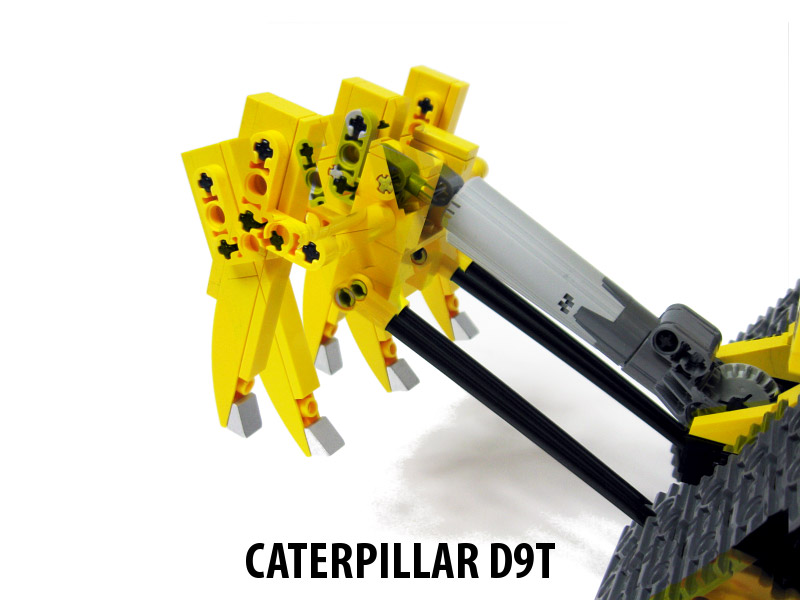
With the drive motors successfully located in the hull it was relatively easy to make the rest of the motors fit in. Several tricks were needed to handle the problem of model’s limited size; for instance the axle that controls elevation of the ripper is driven not by gears but by a system of very short levers. The gears would simply take too much space, and since the axle’s rotation is very limited, the levers can do the job. Moreover, the fifth motor that changes the ripper’s tilt is controlled by a switch inside the cabin, because a switch is much smaller than another IR receiver.
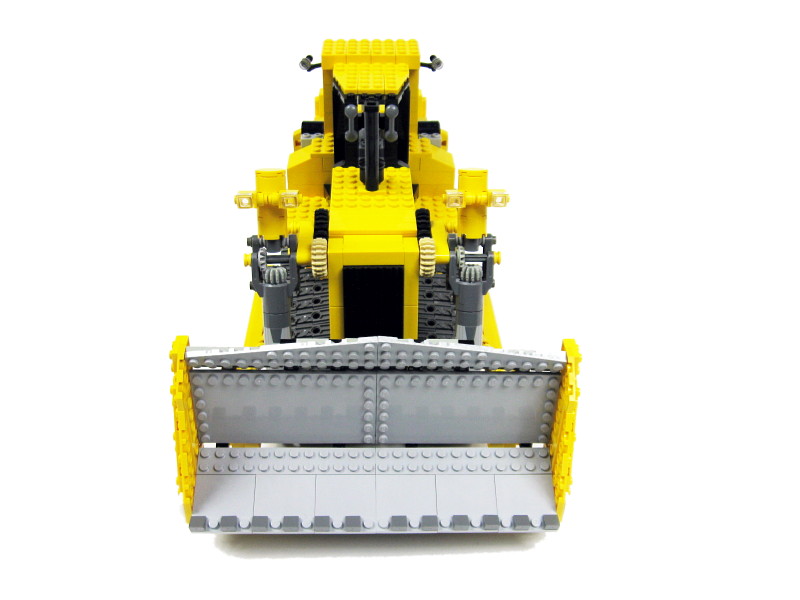
The ripper’s geometry makes it maintain its tilt as the elevation changes. The ripper is strong enough to lift the back of the dozer off the ground, but not strong enough to endure when the dozer drives in such position. The blade, on the other hand, is robust enough to lift the front of the dozer and endure any kind of manoeuvres. I tried to make the dozer lift itself entirely on the blade and the ripper, but in this case the ripper couldn’t take the load.
Other than that, the model’s performance was satisfactory and it was quite a pleasure to drive it, especially with the new handset (the difference in driving with the old and the new handset is presented in the video below). I was happy with its aesthetic side too, although I was aware of several compromises between model’s look and functionality. For instance the driver’s cabin was made longer by 1 stud to house the IR receivers, and it resulted in the changed shape of the dozer’s rear side. Additionally, the bonnet protrudes forward a little more than it should, because of the battery box located right behind it. On the other hand the model has no suspension whatsoever, since it was the only way to fit it with the proper number of properly sized bogies. And I have used metallic silver cheese slopes as the tips of ripper’s blades because it looked more realistic than any usual colour. A minimal amount of custom stickers was used to make the model appear more realistic. I chose not to use the lights, partially because of the limited internal space available and partially to avoid the wires hanging from the headlights, as was the case of my 854G wheeled dozer model.
The model was well welcomed as a good example of my building abilities. It was not better than was expected of me, but it did not disappoint anybody either. Personally, I have considered it to be a relaxing project noteworthy only for its compactness and the first example of the use of the 8879 handset.

















@Mondo
No.
Hi Sariel, I have the originally 8275 tested in snow. The dozer turns very slowly on a position. When it pushes snow with the blade, i realise that the motors have not enough power.
Have you tested your dozer alsoo in snow or outdoor?
@Sariel
Thanks sariel
@Jon Treasure
Yes, I have used bevel gears.
Hi there, I love all you models! I myself is building a D10T, slightly bigger and heavier than your d9, and having some trouble with the drive system. Its to narrow to have two motors side by side like i did with my last dozer (my d9). So i was wondering what gear setup you used to power your dozer? did you use bevel gears or what?
just asking
@MAN
Erm… no. Why should it?
does the engine loose its power when its running slowly????
@Jade2448
It didn’t.
did the back ripper come off when it was ripping dirt because it looks like it would.
Nice dozer! My only critizism it that when the pieces that connect to the bottom of the blade are level, the blade should be touching the ground.
@Tom
Probably not, because it weights less and thus has worse traction.
great work dude.but can it push as much as the original lego bulldozer
@Sariel
You are right, even when you put 2 PF M motors, they’re still 7 studs long, or in technic measurement, 6M’s. If you still have that bulldozer, you can try putting one on top of the other, and use some gearing to reach the Linear Actuator.
@Boris
Yes, I was thinking of that functionality, but the main problem was that there simply was no space for one more motor or even a small pneumatic circuit. It would probably take a larger model to include that functionality.
Also, just wanted to say this to everyone, some bulldozers can pitch their plow left-right, so as a solution to that, you can use some LEGO Bionicle parts, or some LEGO Bionicle Balls, so, when I earlier said: “…two motors are going to power the plow…” I meant on tilting it.
So, you can just modify it a bit and put 2 pf motors, and some bionicle arms/legs with those ball things at the end, and when one linear actuator goes down and the other one goes up, it should tilt. =D
I am a big fan of all of your creations. =D Keep up the good work!
@alex
No, I have no idea.
Hi Sariel
Do you know if there is already in some Lego blogs a comparison of Pneumatic Air Compressors?
It would make sense to know how much time it takes to fill an Air Tank with different combinations of Electric Motors/Number of Pumps.
Thanks,
Alex
super
tl8, I also have a NXT set, and I am working on a bulldozer, but two motors will power the front plow. It will be finished once I get a second NXT set, LOL xD
However AWESOME BULLDOZER! GOOD JOB SARIEL!!! I LOVE ALL OF YOUR CREATIONS!!!
very impressive job on fitting so many motors and functions into a chassis that small. well done, well done.
Very nice.
It somewhat puts my bulldozer into the right perspective. I now see I did have ok proportions (and I thought it was massively too tall(only mildly to tall :P)) http://www.orbiter-forum.com/blog.php?b=47
I did have the problem of not enough parts and very poor weight distribution as well as fitting the NXT motors in.
Keep up the good work, I really get a kick out of looking at your creations and seeing how you tackled the various problems.
cool
it is a beautiful structure but personally I had a slightly better finish but you expect technical things work fine for me
PS I am waiting for your next model
Greetings teunj:)