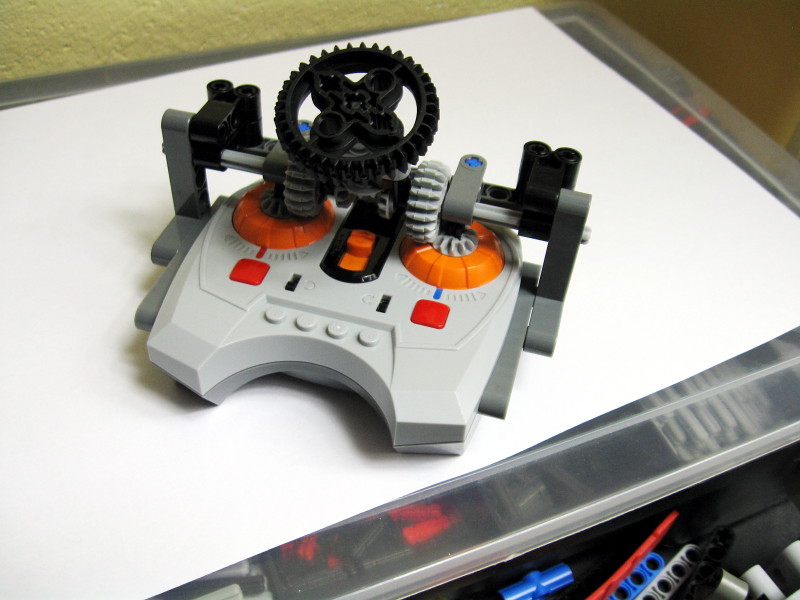
8879 Power Functions Speed Control Remote modified

Presentation of the new, speed control-enabled Power Functions handset along with a modification I’ve created to allow easy control of the tracked vehicles. Update: instruction added.
I have been waiting for the 8879 handset for a while, expecting its speed control feature to come really handy. It was obvious that just like the previous handset, this one would see many modifications, so I have planned some on my own beforehand.
The speed control feature implemented into the Power Functions system but never used earlier, offers a number of new possibilities. For instance a heavy model driven by the powerful PF XL motors can speed up or slow down gradually, while with the previous handset it had to be done abruptly, at full motors’ power. Not only does it reduce strain on the drivetrain (thus making it potentially possible to gain greater speed), but it looks realistic too. Moreover, the tracked vehicles no longer need a subtractor – they can be driven by a single motor for each track and controlled as precisely as if fitted with hydrokinetic transmission. Removing a subtractor results in a much more robust drivetrain system and in substantial savings of the internal hull’s space.
The handset itself is small (the exact size of two previous handset put side-to-side) and complies with the previous handset really well when it comes to putting several handsets together or the general working principles. Just like the previous handset it is powered by three AAA batteries, it has a channel selector with 4 positions available, and two pole reversers, each for a single motor. Instead of two levers present in the previous handset, we have two dials here. Each of them has diameter of a little more than 3 studs, and a 1 stud deep axle hole. The dials offer 7 levels of speed both forward and reverse. It comes as a surprise that the dials’ movement is not limited – they can be rotated freely, and do not return to a neutral position. Instead, each dial has a red square button that immediately stops the respective motor regardless of the dial’s position. It’s a bit confusing, especially with tracked vehicles, making it hard to synchronize both dials. Fortunately, the dials don’t rotate smoothly, but by small jumps, which is helpful because each jump corresponds to a single speed level.
Another surprise is the fact that the new handset does not require a constant contact with the IR receiver. While the previous one caused motors to stop upon loosing its signal, with the new handset the motors continue to work uninterruptedly whenever the signal is lost. While it may appear somewhat unsafe (it’s more likely to loose the control of the vehicle that it was with the previous handset), it can be used as an advantage in many situations. Trains builders will certainly appreciate this solution, and so will anyone who chooses to drive his vehicle outdoors. If you think of building a PF-powered vehicle with a degree of autonomy, this handset is a perfect solution, eliminating the need to keep the vehicle’s IR receiver linked to the handset at all times. Instead, it can be given an initial command and then operate on its own.
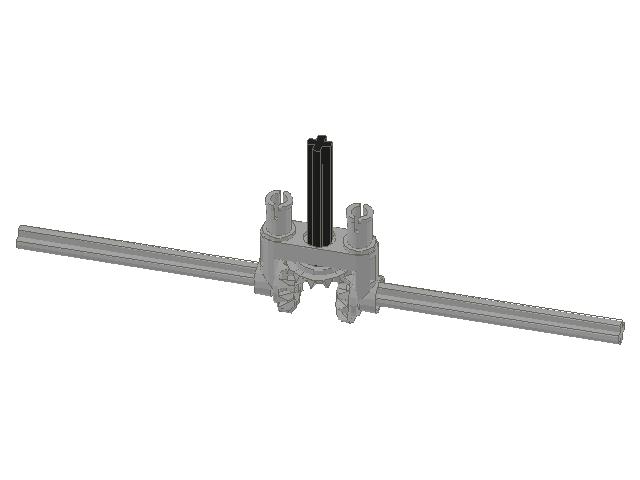
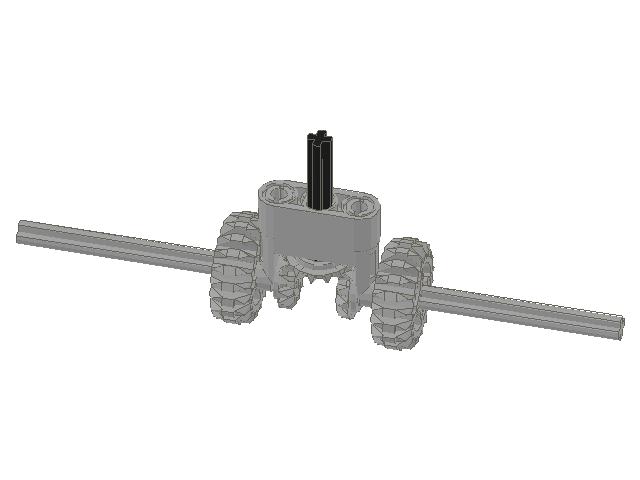
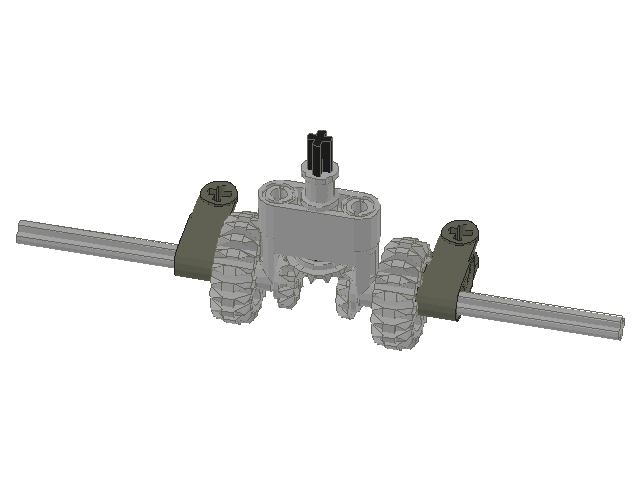
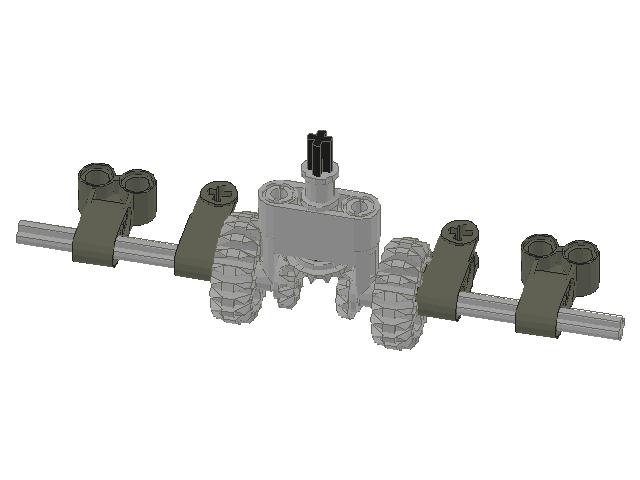
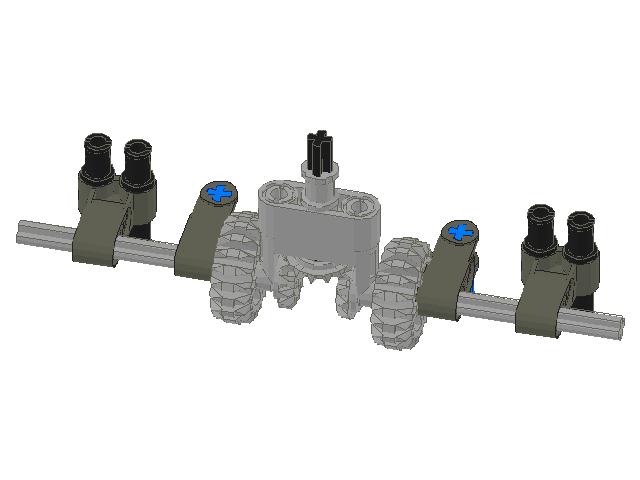
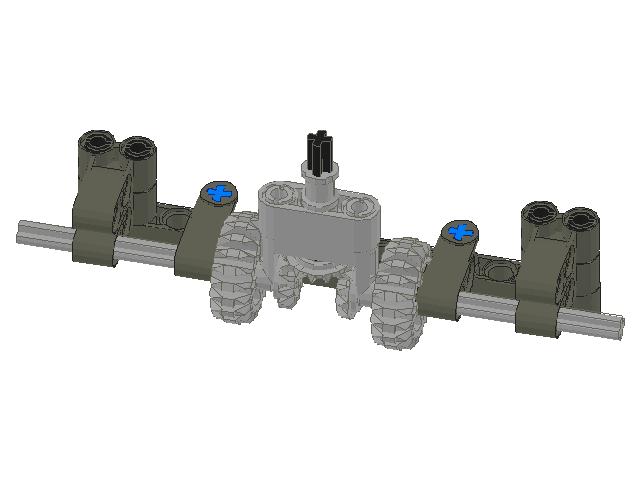
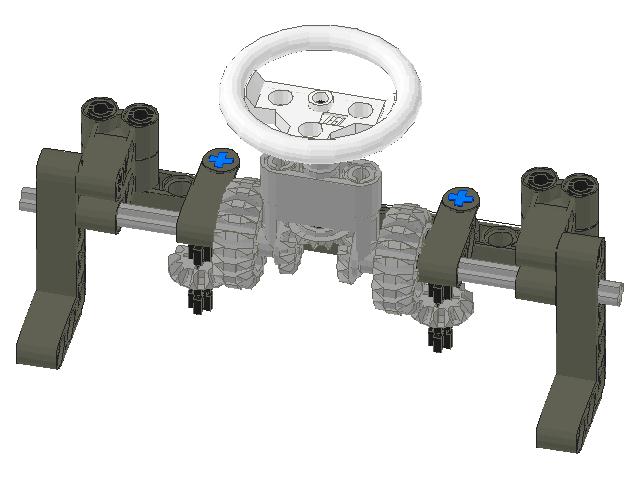
In order to make controlling the tracked vehicles easier, I have build a simple modification on the handset. It’s a sort of a steering wheel that can be tilted forward / backward to control drive, and works as a regular steering wheel in any position. It does, however, lack some precision, and the gear ratios make it impossible to use the full scale of the handset’s drive control. If we assume that +7 is the full forward speed and -7 is the full reverse speed, the steering wheel offers range from +7 to approximately -2. Therefore it leaves plenty of space for more advanced modifications.
You can see functioning of both original and modified handset from the video below. Additionally, there is my unfinished model of the Caterpillar D9T tracked dozer used as an exemplary tracked vehicle.









@gNat
Yeah, I have the same problem. The controller wheels have such big resistance, that this construction is not able to turn controller’s wheels. Unfortunatelly, I have no bigger gears to try it with. Anybody solve it? Some other controller instructions?
@Dom
http://www.bricklink.com/catalogItem.asp?P=48496
@hbjatek
http://www.bricklink.com/catalogItem.asp?P=32557
Hey Guys,
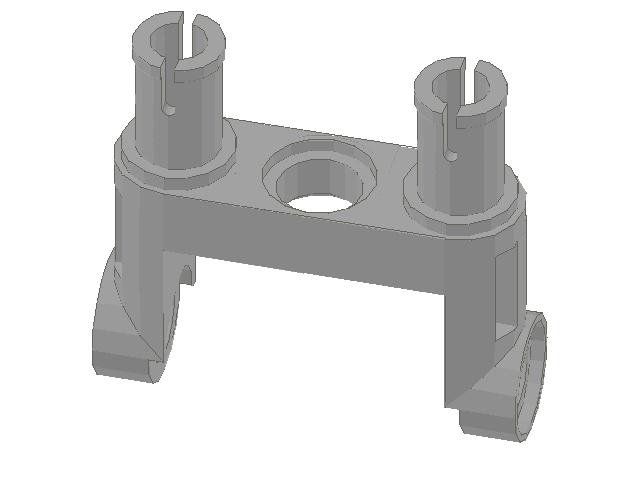
What are the little pieces on the left and right side on the 6th photo?
Thanks a lot!
What set is The first piece in the instructions in?
Thanks
@Matias
Thank you. Did you try my book? Pages 182-183, it’s all there.
Hi Sariel, We loved your idea here, my soon to be 8-yr old would love to build this. I have read and re-read all the comments and googled everywhere but cannot see a list of parts required so we can try to order them online and attempt to build. We are new to technic, this would be one of our first to build. Could you please share the list of parts to order ? Thanks!
@Nir
What engine car?
Hi
I have another question
Where can I find an instructions to build an Engine car?
I bought a lot of parts (wheals, Axle …) and I would like to see a car model.
Thanks
ouch – it wasnt clear
@Nir
Yes, you need another part: http://shop.lego.com/en-PL/LEGO-Power-Functions-IR-Receiver-8884
And a little basic knowledge wouldn’t hurt either.
Hi
I bought engine 8293 and Remote 8879 but I don’t understand how they work together?
Is the remote control this engine?
Do I need another part?
HI,
I LOVE THE WAY YOU MAKE THIS 8879 Power Functions Speed Control Remote. DON’T KNOW IF IT’S POSSIBLE TO HAVE ALL THE BRICKS’ #S THAT YOU ARE USING FOR THE UNIT. I NEED TO ORDER THE ENTIRE INDIVIDUAL BRICKS ON BRICKLINK. THANKS!!
Great idea and nice tutorial.
It works smoother if you use bigger gear-wheels.
@gNat
Since wheen speed control dials have any resistance?
I don’t know if i’m doing something wrong, I think that I followed the instructions corectly. I have trouble with part bedning, and gear slipage, it just doesnt want to over come the resistance of the speed controller dials.
Any One now all the part numbers please Help????
Shame on me.
I’m not always comfortable with the English sites.
@Yoda_Software
Why do you go to Price List Guide when you should go to Lots For Sale?
Thanks for your links
I probably don’t used properly research (the site seems to me a little complicated).
When I’m on the http://www.bricklink.com/catalogItem.asp?P=48496 page and I go to the Price List Guide, there are none available.
If I search for other pieces, add them to my cart and look for the 48496 part, there are no results.
By which way do you arrive to your result page ? Because I might need it again for other parts.
@Yoda_Software
Really? I see at least 4 sellers inside France: http://www.bricklink.com/search.asp?pg=1&colorID=11&itemID=50156&sz=10&searchSort=P
Or you can use this piece instead: http://www.bricklink.com/catalogItem.asp?P=87408
I am a beginner in LEGO Technic.
What other parts can I use instead of #48496.
On BrickLinck, it is not available for delivery in France.
Thanks in advance for your help.
@Ali
Oh come on, these are like the cheapest and the most common Lego gears in existence.
What other combination of gears can I use if I don’t have those that fit in the orange buttons? (6589). unfortunately I only have 4… so I can use 3 for the steering wheel but that’s it..
@Maciej
Ok, szukaj.
Dzien dobry
A moze twoje rozwiazanie pilota mozna bezposrednio zastosowac w modelu 9398?
Kontrola predkosci jest przydatna i szukam rozwiazania by oryginalny pilot zamienic na 8879 z przeróbka.
@Sariel
@Maciej
No.
DearS Have you got any idea for use this remote controler for model lego 9398?
@Shorjok
It can be, it the wheels are set-up in a proper way. Look for example at my latest build, the NXT Peeping Tom – it has wheels, but it uses skid steering.
I know this is an old post, but I need to ask you a question.
Is this type of control suitable for non-tracked vehicles?
I am making a vehicle that can’t steer and so requires the speeds of the back wheels to change between each other.
@bachaddict
Yes.
Did you notice the tunes made when you use the 43362 motors?
raet idea i have to say 😀
Thank you! I’m using this in the mini excavator I’m making to drive it, and the thumbstick to control slewing and raising and lowering the boom.
@Sariel
I thought so: D I would just ask if now was the case:) anyway thanks for the quick reply:)
@Magnus Kjær
Of course it can’t. The only way to make motor go faster is to feed it with higher voltage (12V, for instance) which can damage it.
Can the Speed Remote Control make the motor go faster than it can with the normal controller.
– By the way thanks for the quick answer before:)
@Magnus Kjær
MLCad and LDview. Both are freeware.
I know that it’s not exactly a question about the, by the way extreme awesome, little construction . But… I wondered wich program or website you did use making the instruction for it:)
Nice speed control attachment! Although I think it would be interesting to add your smaller subtractor to the controller, so you can make one stick steer a tank, anther drives it forward.
This is the part: http://www.bricklink.com/catalogItem.asp?P=48496
And the axles are 7 studs long each.
also what are the lengths of the axles used
what is the part number for the part in the first picure of the instructions
@matthew
You can ONLY make it slower, you can’t make it faster.
Can you make a motor slower than the standard speed,or is it only faster?
@Alex
From what I know the current limit is defined by the battery box / battery. It’s true that it may be insufficient for multiple motors working at once, especially for multiple PF XLs. This is why some builders use two battery boxes at the same time, each powering only some of the motors. For example my Scania Dump Truck was powered by a single battery, driven by two PF XLs and had multiple lights. The battery was very strained and it would go off occasionally when driving over obstacles.
This is not strictly related to 8879, it is about the Power Functions IR Receiver.
I have been told that each IR Receiver has a “current limit”,
therefore using two of them instead of one – both attached to the same battery box – would give better performances.
Do you agree? Thanks
@Sariel
i just ordered all the parts exept one (7) axle.
@chili
I’m not sure, but if it happens to gears on one side only, then perhaps the gears are worn? Try replacing them.
Umm.. my gears on left side are jumping over their teeth and are making cracking sounds all the time i try to use this controller, is there any simple way to stop that cracking noise/jumping over the teeth?.
@jochem
http://peeron.com/inv/parts/48496
where the heck did yout get the first part of the instruction?
plz gimmy tha part number
btw nice controller
@Juan Manuel
Pieces: http://www.bricklink.com/index.asp
Instructions: http://us.service.lego.com/en-US/BuildingInstructions/default.aspx, http://www.hccamsterdam.nl/brickfactory/
All it takes to find these is to use the Google.
I have a very big problem! I am a peruvian boy so i dont have
many places to buy lego…. another problen is that lego is
so expensive in my country… well i could buy some models for example
the lego enzo ferrari and anothers old models. But i want to buy
more and more just like you, so my questions is where can i get lego´s pieces? and where can i get lego´s instruccions??
please help meeeeee!!!!!!
@diego
My email is written on the first photo of my every construction.
Hi, i like very much your models, and there are some things that i want to ask you. i don’t know if this is the better place, it is about other models and pieces. is it a different way where i can text you?
thx
you coud get the wheel loder
Thnx u sariel! i think ill get the tracktor / dune buggy set and use it from that.
@Nick
Here Nick: http://peeron.com/inv/parts/48496
Do any of you know where to get the first brick in the instructions list for building the modified controller for tracked vehicles? its the first brick that you start out whith. does anybody know?
@Bjorn Leenen
Just wanted to say something related to your post, also this is an answer to your question.
Here is the delay time of bluetooth, ir, radio, cabel (usb or something)
this is for TrTr.
The fastest is the cabel because the Electrical signal can travel thru the wires, without any problems.
2. is RADIO CONTROL, because the signal travels really really fast so the response time is almost instant. (you can get it from the DIrt Crusher or some set like that) Now you may think: ” Wtf? almost instant, you mean I press the button and wait couple of secs until the reaction?” NO, you won’t wait, when you press it, it reacts.
3.is bluetooth, this may work for anyone who has a NXT, because you can easily control it from your cell phone. But the distance is the prob here, because it works really well for let’s say 10m MAX, and then you lose the signal. =(
4.is the Infrared, it is SLOW, when I say slow i mean slow, It is the slowest possible way of sending a signal. Anyone with a phone that has IR, and has used it, can tell you that it’s slow, and the PF IR Remote is no exception, it is pretty fast, but still slow. =((
@Adi
Truck Trial.
What does TrTr stand for?
@Bjorn Leenen
For strictly TrTr purposes RC is certainly better. Personally, I won’t buy it because I’m not so much into TrTr and for the other purposes I’m fine with Power Functions.
Hi Sariel,
Love all of your work and footage of the TrTrS. Question:
Now that you’ve seen this RC and the rechargable batterybox, would you recommend buying these or the ‘regular’ sets for driving a TrTr? In all of the movies you’ve published, I’ve seen the same thing: wlak next to you car, otherwise it will not function.
I’m thninking of buying the RC and box separate, just for this purpose. Is this a wise descision?
Pozdrowienia,
Björn (NL)
@blork
Just two motors. That’s the point of showing it with the new remote.
does the bulldozer use a subtractor?? or just 2 motors
good work sariel I like it but I have seen a link on youtube like this one http://www.youtube.com/watch?v=x9wy3oTRcl8 it’s a normal pf remote with a joy stick made by bazmarc 😀 hope you like it ps sorry for my bad english
Does anyone know when this will be avaliable to purchase??
@Koenigseggccr007
You mean like the DX6i?
it is better than the previous remote controllers, but I still don’t like the idea. Can’t they just make a real remote controller, like the ones they use in the rc world.
This would be interesting to try with a a catamaran boat, especially due to the way that the wheel/throttle combo works. In fact, the boat would probably respond in much the same way that the ones at Legoland do. I’ll get back to you when I accomplish this.
My initial idea was seeing if I could make this smaller:
http://www.flickr.com/photos/govissuedtoaster/3506147362/
Because of the lower speeds, I think I could possible remove the need for self centering steering.
and for my Idea, was something like this
http://www.uberreview.com/wp-content/uploads/real-size-remote-control-car.jpg
@Matthew Evans
No, it will not replace a steering system for a car, because it’s not really useful when it comes to steering of a car.
And if you want two joysticks, then the previous handset has them.
I don’t know what the discussion is about, but, I have a question.
Will this replace the need for self centering steering, for rc car and like? Also, I was wondering on one of your future projects, is making a gocart. I would love to see that, no matter how easy it is to make.
One idea of a mod to this remote is making something very much like a radio remote control. You know, with two joysticks. Just an Idea.
Nie. Jest tam tylko dodatowo regulacja prędkości.
A czy ten pilot ma większy zasięg od tego zwykłego?
Jest jeszcze ładowarka i zasilacz. Ja kupiłem sam pilot.
@MaryceL
Google Twoim przyjacielem: http://shop.lego.com/ByTheme/Product.aspx?p=8879&cn=587&d=70
Gdzie go kupiłeś?? I za ile??
@Gobbi
To nie dyferencjał: http://peeron.com/inv/parts/48496
Co to za klocek robi jakby za obudowe dyferencjału? Taki czarny między zębatkami (dbev(TU)3małe bev(TU)dbev)