4-speed Compact Sequential Transmission v1.1
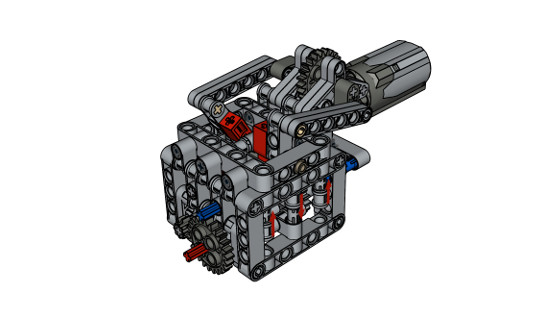
An improved version of my 4-speed sequential transmission controlled remotely by a single motor: smaller, stronger and much more effective. Instructions available.
A short while ago I’ve designed a compact 4-speed sequential transmission that could be controlled with just a single motor, and while it was in many ways better and more practical than most of my other transmissions, it wasn’t perfect. Its primary problems were being tall and generating plenty of friction on 3rd and 4th gear. It took me a while, but I managed to solve both problems, creating a transmission that is much more effective while also being smaller and stronger.
Just like the initial version, this transmission can be shifted by any motor, in any direction, and in full cycle – from 1st speed to 4th and back to 1st. The “core” mechanism is just 7x7x6 studs big, plus the shifting mechanism which isn’t too large either. The transmission was designed specifically to be narrow and low, so it can be placed between stringers of your chassis easily – they need to be only 7 studs apart. The input and output shafts go through the whole transmission, so they can be connected from the front or back of the gearbox – or even from both sides e.g. if you need to drive two axles, with transmission located between them.
Aside from the size and very robust structure which allows it to handle plenty of torque – in fact, the transmission should withstand any stress until the breaking point of the driving rings – the main advantage of this design is low friction, which makes it very effective. This is because the higher the gear, the fewer active gear wheels are being used, which allows a single PF M motor to run this transmission on 4th speed without much strain.
This is the best transmission I’ve designed up to date. It’s much more practical than any other of my designs, being effective, easy to control and requiring little space in the model. I hope you will find it useful.
Free building instructions for the transmission are available in the Downloads section.

its better than porn!
Hey Sariel,
awesome work as always!!! I would realy like to see this gearbox in auto version using this concept
http://sariel.pl/2012/02/nxt-automated-gearbox/. I know its kind of an odd request :p but i think it will be quite efficient and interesting as well…. and i have no nxt 🙁
Keep up the good work
PS: sorry for the late reply…. university exams
I tried to make the new version, but I didn’t have the new transmission rings (I’m using parts from the 8258 crane truck). I decided to keep going with my own ideas, and I have a really small and mostly reliable 2 speed gearbox, the first I’ve ever made with my own ideas (in your instructions i only got up th the 3rd step so that dosen’t count,). It’s manual at the moment, but easily converted and has a 1st speed ratio of 1:1, 2nd speed ratio 3:1
@Sariel
Oh sh**. Well I guess that’s the End of my Idea.
@Ev3fan
Yes, but they both shift simultaneously. Which means that there’s a short moment when they are both engaged and if you drive the gearbox at this time, it will lock up.
@Sariel
But…isn’t one ring engaged and the other disengaged at the same time or did I get that wrong? Anyway, thanks for replying 🙂
@Ev3fan
Should be doable, but there’s still the problem of two driving rings which can’t be shifted while driving because they will lock the gearbox up.
Wait… Wouldn’t it be possible to easily automatize this by havig a diff in the drivetrain whose third input/output would turn the axle the m-motor turns and a lever with a rubber band so that if torque applied to the drivetrain would exceed a certain limit (when you e.g. drive up a slope) the axle would be turned and it would shift down and in turn shift up when load decreases. What do you think? I think this could be really usefull to some vehicles (especially these who are not built for a special purpose like e.g. crawlers or racecars are).There would only have do be some limit to levers’ movements so hat it doesn’t shift from first to fourth or from fourth to first.
@Marcin
What J0rtikka said, but the clutch gears you already have will work with the new driving ring and connector. Also keep in mind that these are far cheaper from LEGO than on Bricklink at the moment – the connector and driving ring will cost you $1 from LEGO, but $1.37 at an absolute low on Bricklink right now.
@Marcin
#18947 technic driving ring
#18946 technic gear 16 clutch on both sides
#18948 technic driving ring connector
Great idea Sariel, I built the gear box directly after I saw it. Unfortunately I had different axle connector and different transmission ring. At the end it was not that compact as yours. I dont know the type of axle connector, and transmission ring which you have used. Can you provide the numbers of this two parts, would be helpful then to find it and order.
best,
Marcin
@TheMindGarage
Or you could buy a PF M motor which is dirt cheap.
Love the shifting system. Definitely will use soon. But I only have 3 motors (2 EV3 L and 1 EV3 M), so I will probably have to do manually.
@Sariel
Changed it already and fixed the whole problem. I found a small instruction in your book for a driven axle with suspension. Using it now with RTC steering using hockey spring.
And why was it so far away? I’m pretty new to Technic MOC building, and when it wasn’t driving the axle was straight, so I thought it would work.
Will never regret buying your Technic guide, it has helped me so much!
@Sariel
Thx man (^_^). Downloaded the instructions.
@Tazra Duchamp
I think you should take a look at this: http://www.nico71.fr/trophy-truck-with-continuously-variable-transmission/
Sariel can you built a high torque front gearing automatic gear box that switches automatically depending on the load it has to push and goes backwards when the load surpasses it?
I have this idea of a sumobot that is losely based on Aikido. Push when being pulled. Pull while being pushed. In this case the pull would only engage when pushing back surpasses the push load of the robot itself.
@Lorenzo
No offense, but there are many, many things wrong in this picture. Why would you use PF XL motor for the steering? It’s completely unsuited for that. PF M with 9:1 gear reduction would be better. The gear wheels are not braced nor supported properly. And most importantly, your steering rack is far from where it should be, I mean no wonder the wheels do that because your steering geometry is way off. The rack should be right next to the differential, so that the steering links are parallel to the suspension arms.
http://puu.sh/h9Jiq/1c31f9617a.JPG
Hello Paul,
I’m currenly making an RC 4×4 car but keep running into the problem in the picture above. I tried many different steering methods but this keeps happening. Do you know what to do?
@Benjamin
Not with driving rings, no. They are disengaged at neutral so they can’t transmit anything.
@Sariel
Oh, okay.
Speaking of gearboxes, do you think there is a way to turn neutral into a speed on a simple transmission?
@Benjamin
Sure, although with a smooth axle connector you won’t be able to hear the shifting.
Do you think it would be possible to use the older transmission ring in a variant of this? It would be able to slide freely on a smooth axle connector, reducing the time between gears.
Amazing work though, I’ll have to use this sometime. 🙂
Wonderful. You never fail zo amaze me.