Pagani Zonda

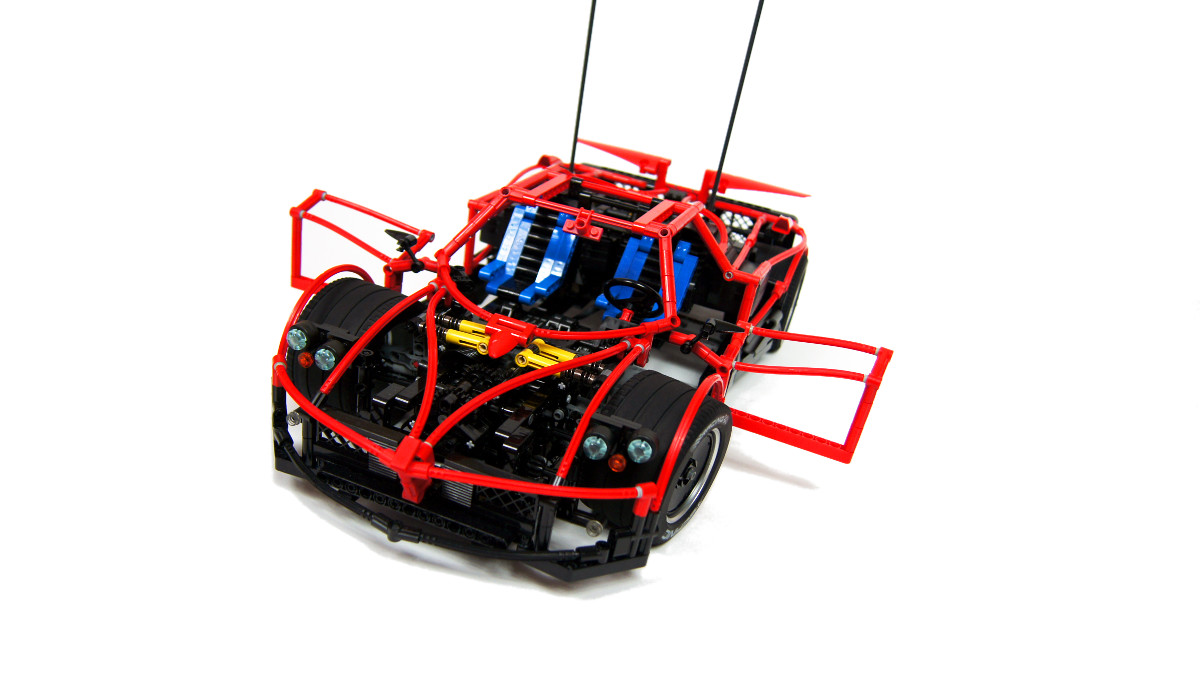
Model of one of the world’s most exotic supercars. Features full suspension, high-speed propulsion system, and custom stickers. Update: instruction for non-steered suspension module available in Downloads section.
Datasheet:
Completion date: 02/09/2012
Power: electric (RC unit)
Dimensions: length 61 studs / width 30 studs / height 18 studs (not including antennae)
Weight: 1.996 kg
Suspension: full independent
Propulsion: 4 x RC motor geared 1:1
Motors: 4 x RC motor, 1 x PF Medium
Top speed: 15.41 kmph
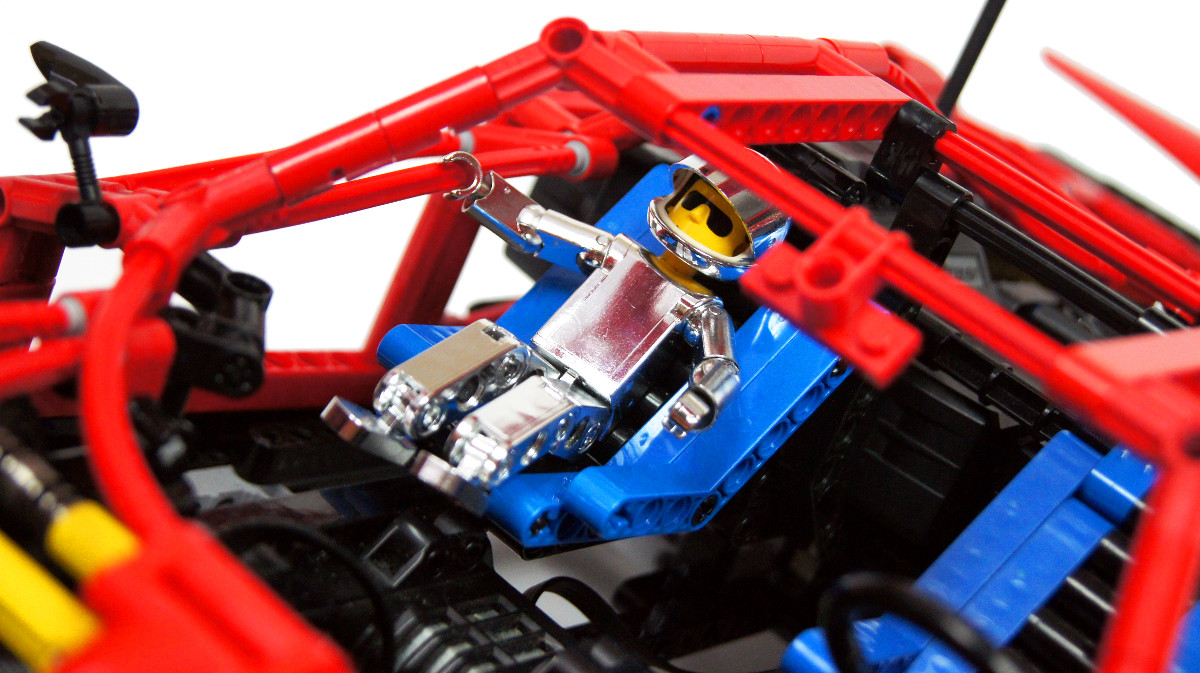
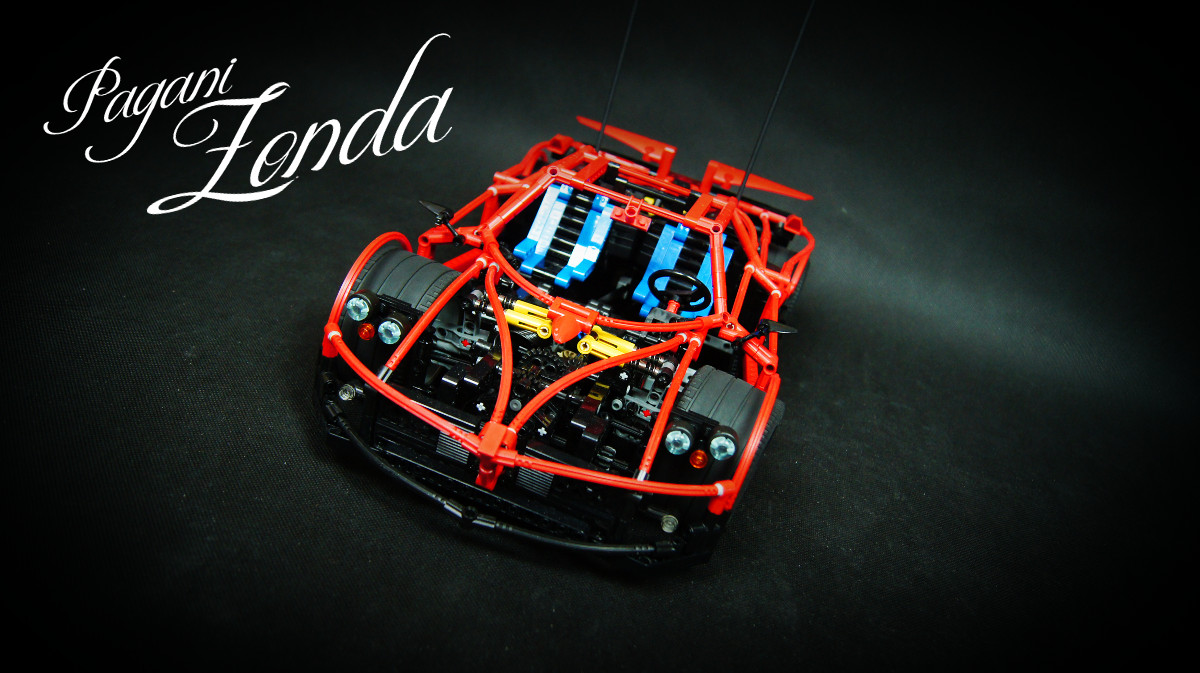
Pagani Zonda is sometimes said to be a phenomenon rather than a car. Among the reasons is the fact that it successfully combines high-tech chassis and body with a vintage-styled interior which feels like in early racing cars from 30’s, as well as the fact that each of very few Zondas is assembled almost entirely by hand (including even the engine). The result is an unique blend of superb performance and beauty of a handiwork. And since there is no assembly line, the manufacturer can easily modify and improve the car – in fact, the basic Zonda has seen no less than 13 various versions before the advent of Pagani Huayra, which is a new model partially based on the Zonda.
I decided to build a model when I found out that I own four LEGO RC buggy motors, well-suited for high-speed applications, and that I can afford a second RC unit to use all of them together (as one RC unit can power two RC motors at most). It was a natural decision to build a supercar model designed for speed, and the Zonda was the best choice because it’s body could accommodate for two RC units behind the cabin.
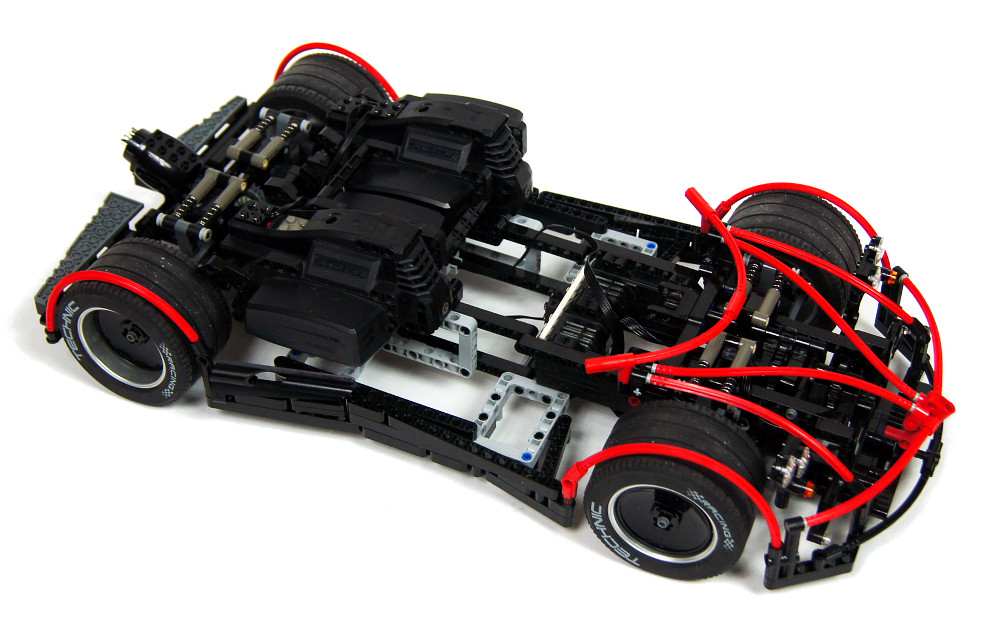
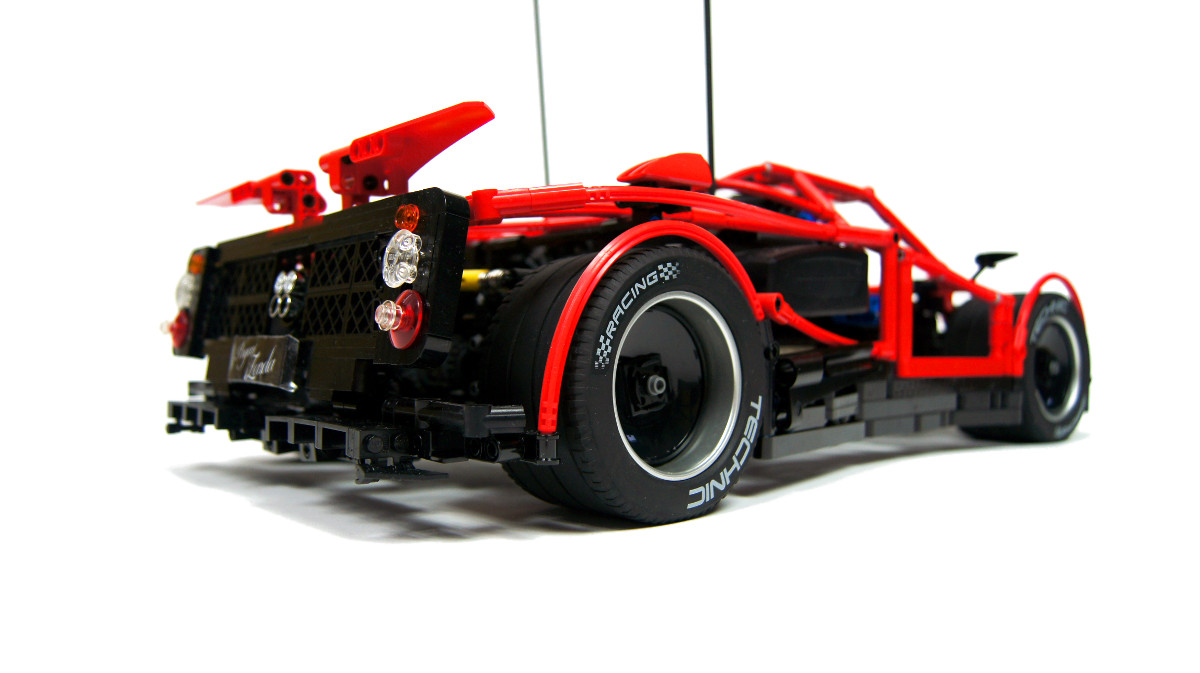
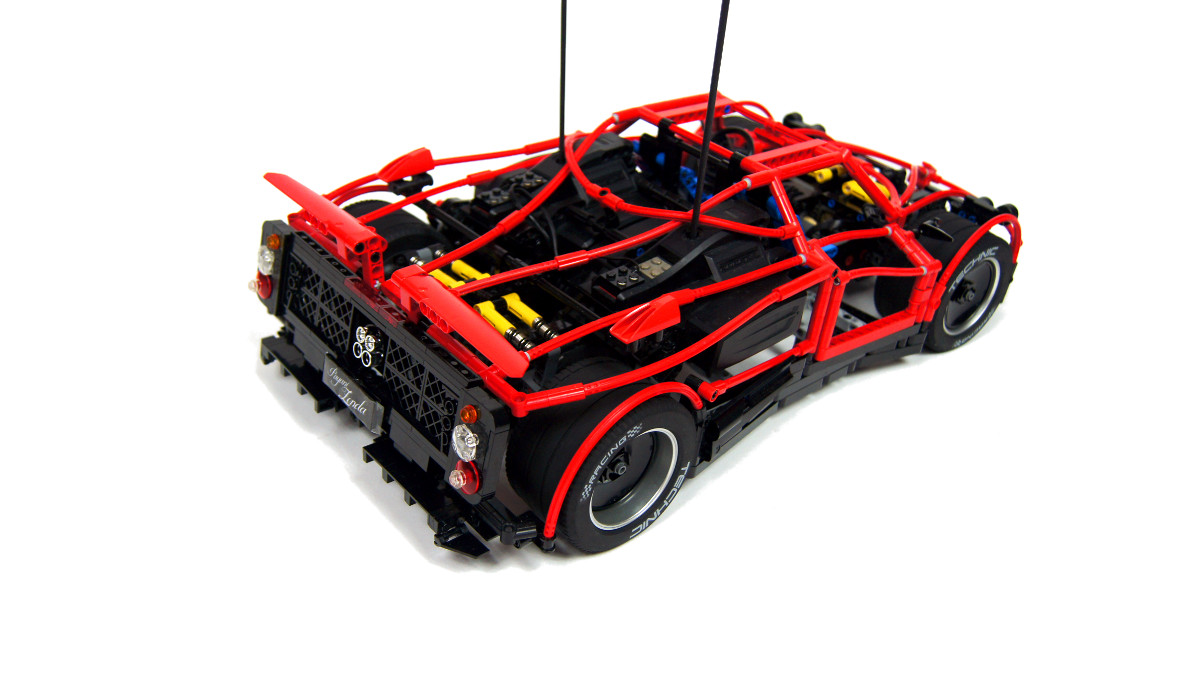
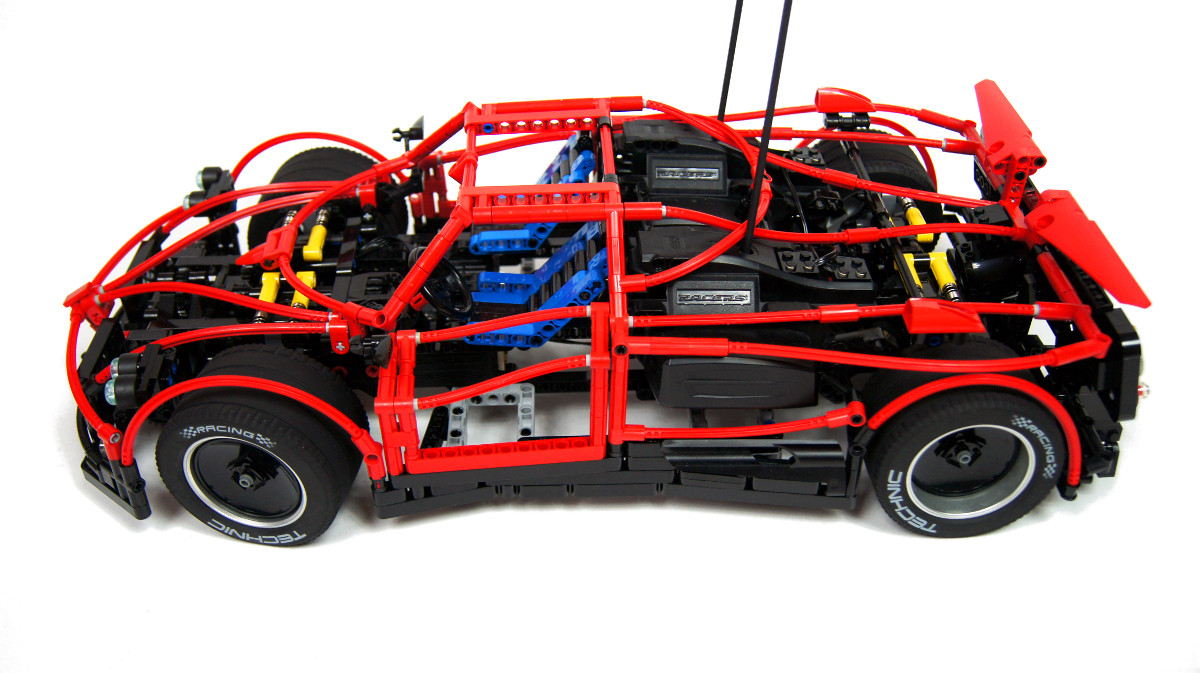
The model was supposed to look good and drive fast. To achieve the latter, both weight and complexity were cut to minimum. Since all the motors and RC units were quite heavy, I made up for it by creating an ultra-light body made only of edges with a handful of chosen details. This involved using flexible axles which are available mostly in red, and hence the entire body is red. To make the chassis easily seen “through” the body and thus make the body appear translucent, I used black pieces for it whenever possible.
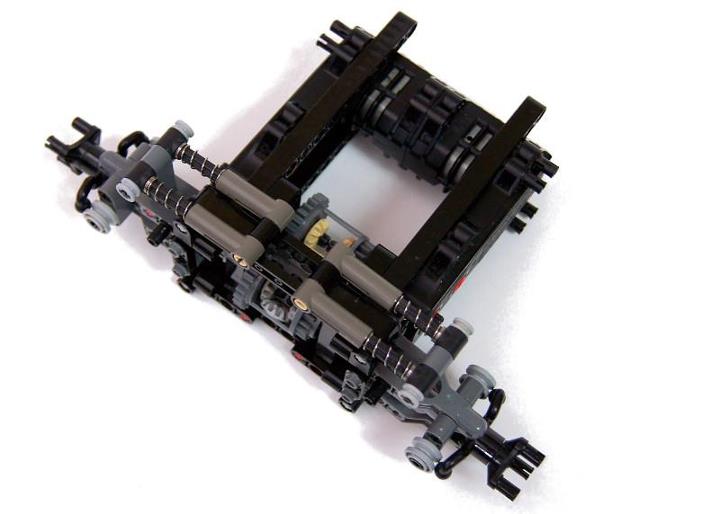
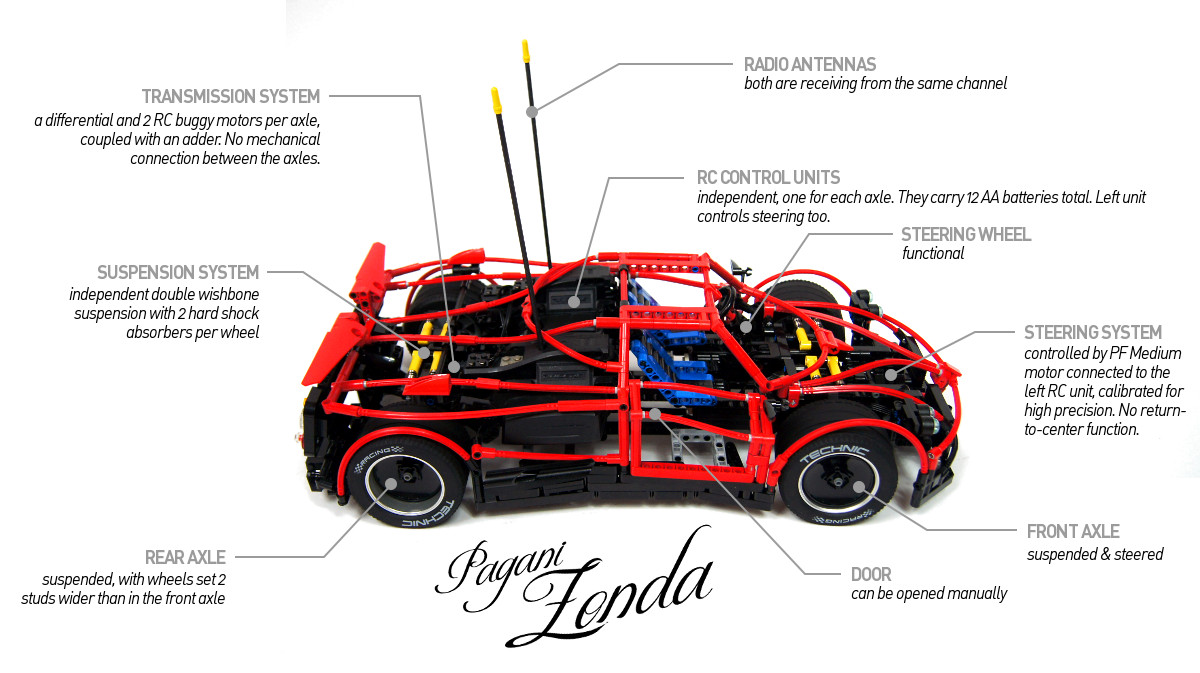
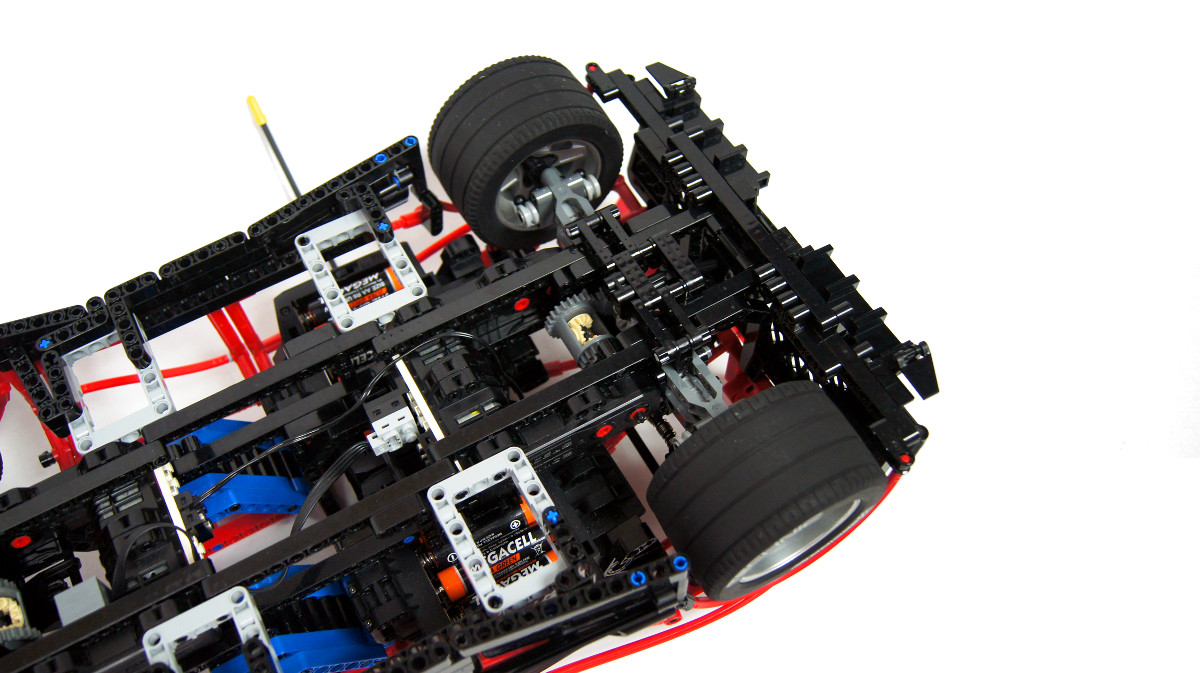
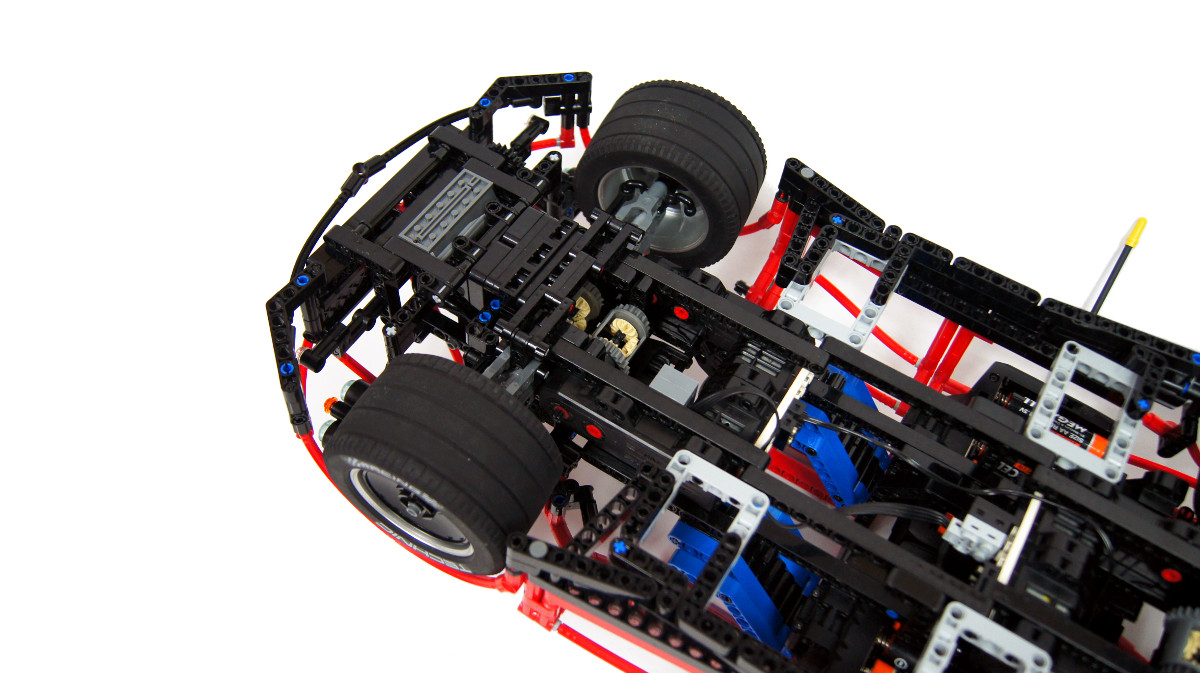
The model’s propulsion system affected all wheels, even though the original Zonda is a RWD car. Driving all wheels allowed to better use the combined power of all motors, improved the weight distribution and simplified the transmission system. The drivetrain was also less stressed this way, and it still handled significant stress – the gears in the rear differential snapped on several occasions when I attempted braking with reverse.
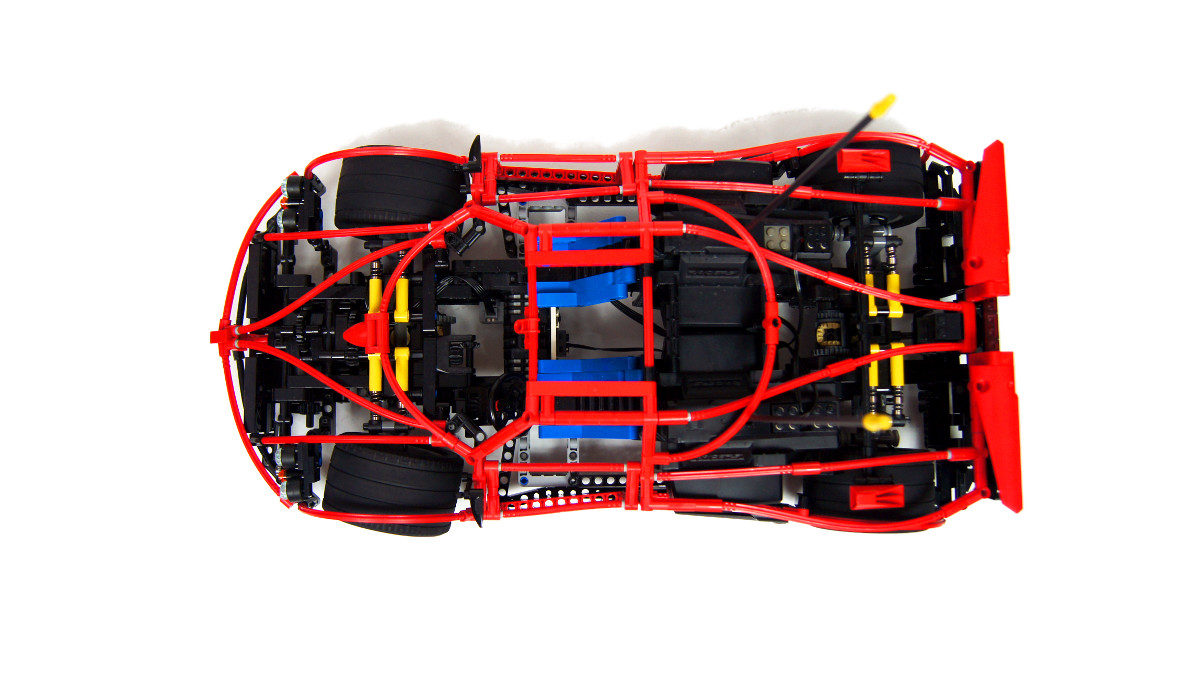
The four RC motors were coupled in two pairs using adders, which drove differentials. One pair drove the front axle and another drove the rear axle – each powered and controlled by a separate RC unit. Thus the model had technically two separate propulsion systems – if the RC units were set to various channels, front and rear axles could be controlled independently.
The axles were nearly identical, with typical double wishbone suspension using two short hard shock absorbers per wheel. The front axle was steered by a PF Medium motor located in front of it, connected to the left RC unit and rotating the steering wheel too. The model had a fairly good steering lock, and the combination of wide slick tires and differentials made it handle very well. Based on my earlier experiences with fast models, I fine-tuned the steering system for high precision, allowing very subtle corrections while driving straight, and I didn’t include return-to-center function which makes steering such a model harder rather than easier.
With fresh, good quality batteries the model had plenty of power and excellent acceleration. It suggested that its top speed of 15.41 km/h (at this scale equivalent to 132.5 km/h in the real car) is not the end of what can be achieved with four RC motors. Using different wheels, faster motors’ outputs and cutting weight lower can result in even higher speed. Using a gearbox can be a good idea too, although earlier experiences indicate that extra weight and extra complication to the transmission system generate loss of power that can annul all benefits of using a gearbox.
All in all, the model provided an interesting experience and was very pleasant to drive. It proved very realistic in how its performance was affected by factors such as weight distribution, propulsion system, type of tires and of suspension, and I liked the look of its somewhat experimental body.
Work in progress photos:


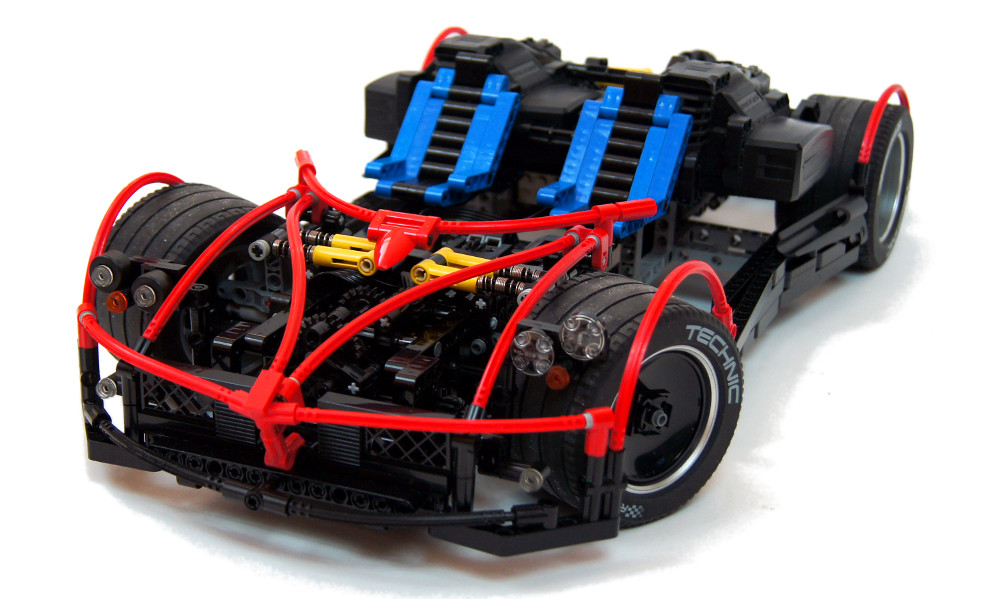
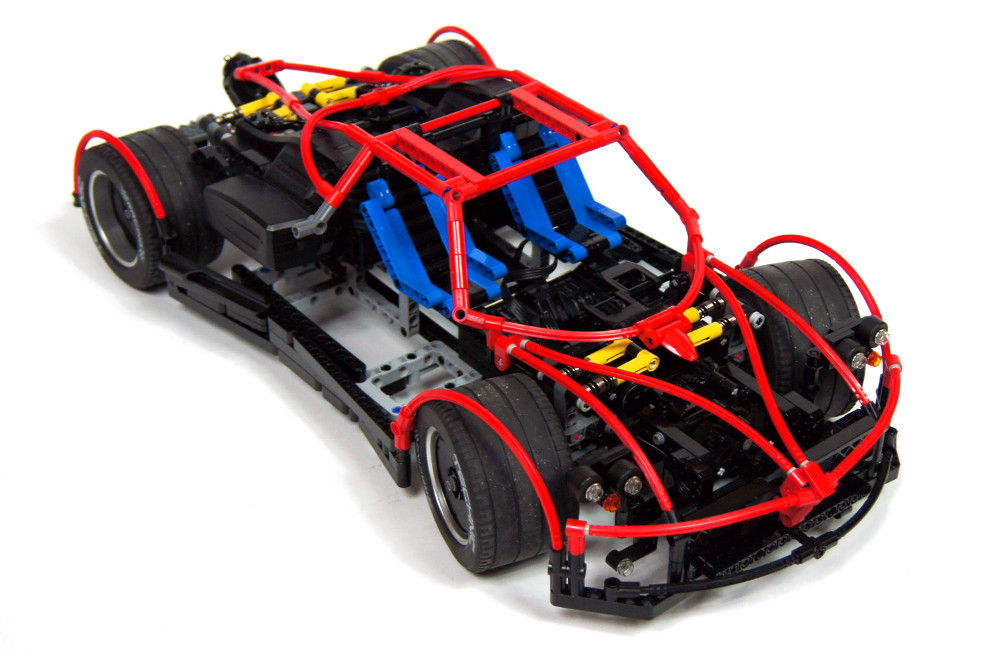

Photos:














Video:
Media reference:
8studs (Polish only), Autoblog.nl (Dutch only), Damn Geeky, Hobby Media (Italian only), Ridelust, The LEGO Car Blog

@Krys006
Nie pamiętam, to było 3 lata temu.