Bugatti Type 35

Model of a vintage racing car built with focus on top speed.
Datasheet:
Completion date: 23/09/2012
Power: electric (RC unit)
Dimensions: length 60 studs / width 20 studs / height 18 studs (not including antennae)
Weight: 1.385 kg
Suspension: front – pendular / rear – dragged axle
Propulsion: 4 x RC motor geared 1:1
Motors: 4 x RC motor
Top speed: no less than 12 km/h
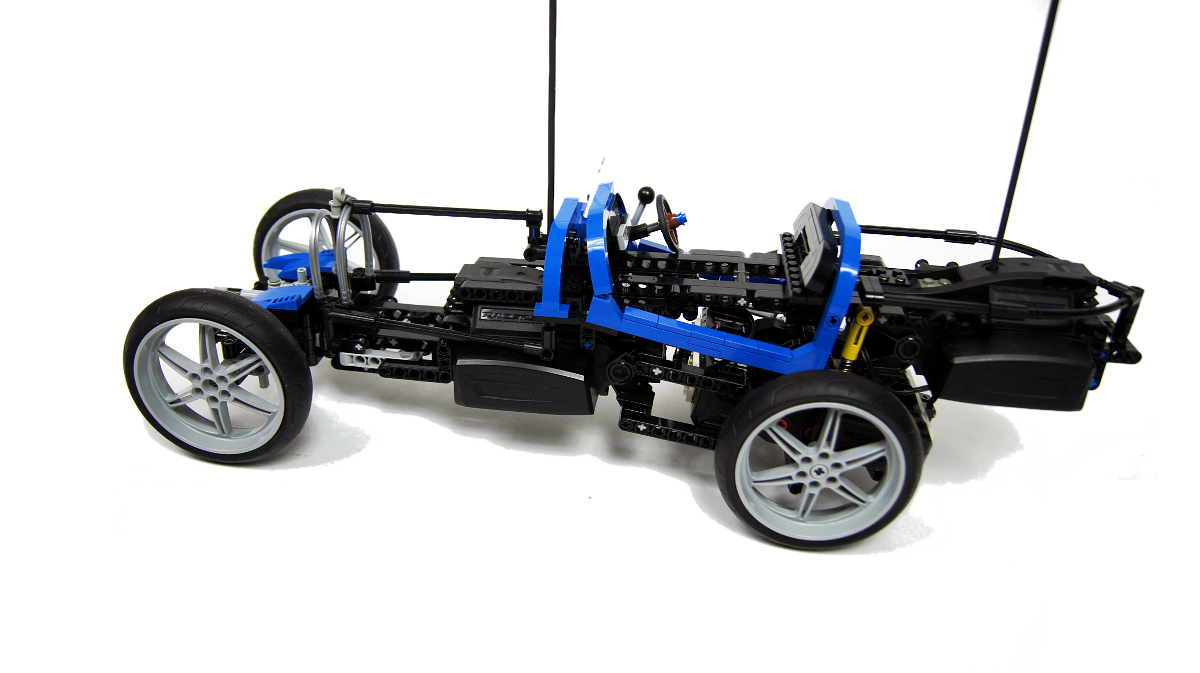
Successor of my Pagani Zonda model, the Bugatti Type 35 was, above all, meant to top Zonda’s speed record. I have chosen this car when looking for some small, simple vehicle with large wheels, that could serve as a platform for 4 RC motors propulsion system used in the Zonda. Since Type 35 is a slim, small car with thin, large wheels and minimal bodywork, and has a great history as a racing car, it seemed like a very good choice.
From the very beginning the priority was to cut weight down as much as possible. Just like with Zonda, that meant making the body “skeletal” – but I didn’t want to use the same technique as with Zonda, and I went for studfull pieces instead. Clearly, that was not a good idea.
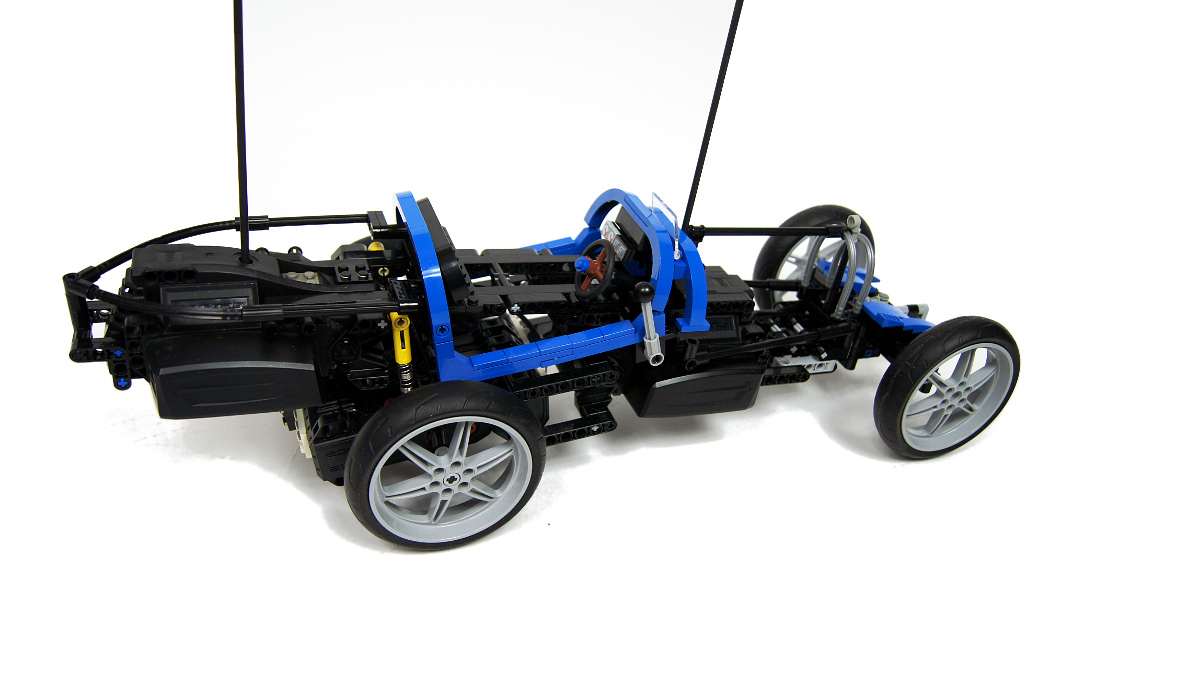
The model was extremely simple and consisted of two RC units, one behind the other, connected by a simple frame. All four RC motors were located between and below them, connected to the front unit’s hinge and suspended on shock absorbers. Thus a simple rear axle was created, with no gears and no differential – instead, it consisted of two half-shafts, each driven by two motors. I have connected the motors so that each RC unit was powering one left and one right motor – this way if the batteries in one unit were weaker than in the other, it would not affect the model’s direction of driving.
The steering was controlled by the front RC unit’s steering output, connected to the front axle with a small gear reduction. It means return-to-center steering, which I dislike, but any other solution would take too much space and add too much weight. The front axle had simple pendular suspension and was connected to the chassis by a small Technic turntable. The front suspension was not stabilized, which made the whole car prone to rolling over. Still, this was the only suspension that would match the look of the original Bugatti’s front axle, and I didn’t want to use no suspension whatsoever.
The model was very ugly and most of the body kept disintegrating. I could not properly attach my phone to it for a GPS speed test, and I’ve given up when upon the first attempt my phone was slammed into a curb, reading 12 km/h at that moment. Thus, while the model was apparently faster than the Zonda, its actual top speed remains unknown.
The model did one thing really good – it demonstrated all the benefits of independent suspension, slick tires and AWD drive in the Zonda. While the Zonda was perfectly stable under any conditions and steered with superb accuracy, the Bugatti was very difficult to control. Its center of gravity was very close to the rear axle, making the model prone to understeering, it suffered from poor traction and stability, and its steering system performed poorly. In that aspect it was quite realistic, and it also prove that plenty of power isn’t easy to control. And in any case, it was fun to drive.








@JJ
Because it’s twice the power.
Why do you think two RC-units and four motors are better than one RC-Unit and two motors? Two RC-Units are very heavy…
@gabry
He built it with speed in mind, which meant minimal bodywork, (Not as nice looking as the pagani) Which would make it weigh less. And when a vehicle weighs less, it goes faster. He did not make it for the intention of looking good or looking like the real thing. He made it so the power to weight ration would be High power – Low weight. Seriously, Think before you speak.
cool, but not nicer than the pagani zonda. It’s too different from the real model. You’ve built better mocs.
That vehicle is awesome! Shame you couldn’t record the actual top speed, it looked much faster than the Zonda. It also looked like it went through more punishment than the unmodified 9398 did when you took it outdoors for the first time 😛 Above all, another great speed-inspired creation!
@Mark
I didn’t. The steering is controlled by the RC unit, not motors.
Great model! Now I am going to need to purchase some motorcycle wheels to build a model like this.
You forgot to mention the steering motor by the motors in the datasheet
“An idea thats not dangerous is unworthy of being called an idea at all.” Such a true quote, and a great build!
@jordan thomas
Actually, I’ve had even worse.
not to be mean but…… 😛
worst model yet 😐
Hi! Been following you for a whie and want you to be in BrickJournal and also would like to get some comments from you about your book!
Thanks,
Joe
I love it !!!
;-)))
Punk spirit and Lego !
Many thanks !