LIME Mk2

My first, very simple amphibious vehicle. Features a single propulsion system for land and water.
Datasheet:
Completion date: 22/04/2012
Power: electric (RC unit)
Dimensions: length 53 studs / width 52 studs / height 21 studs (not including antenna)
Weight: 1.709 kg (including camera)
Suspension: none
Propulsion: 4 x PF Medium motor geared 3:1
Motors: 4 x PF Medium
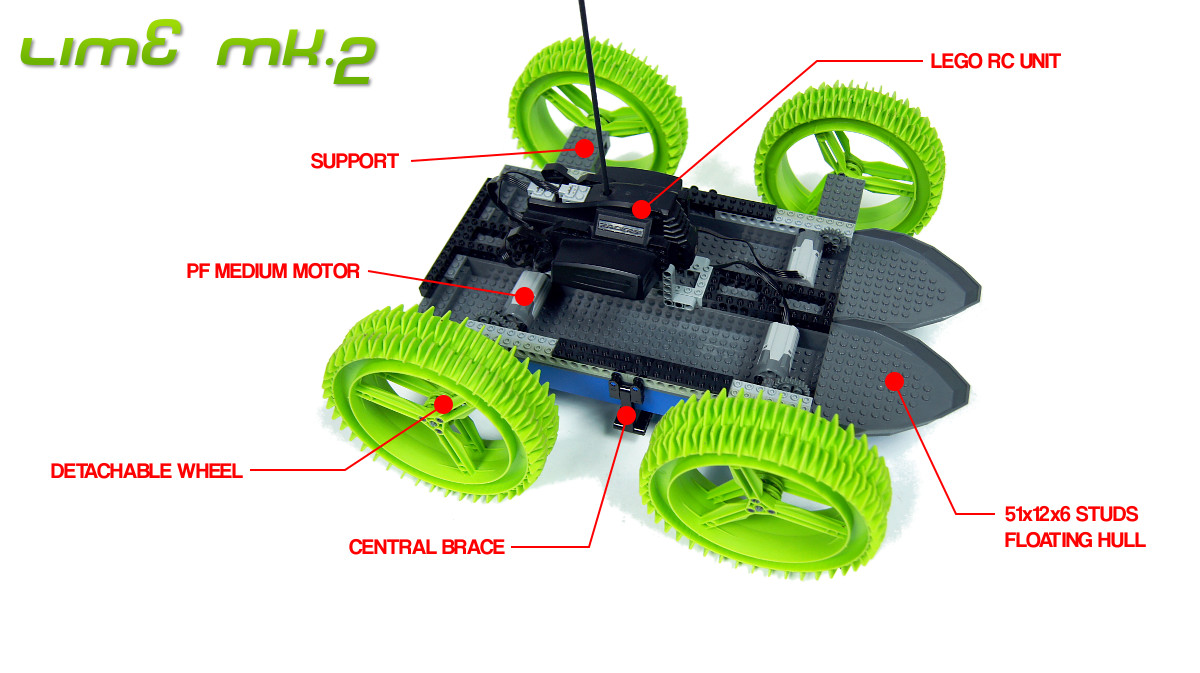
LEGO amphibious vehicles seem to be a challenge in the eyes of many, and I have been asked to build one more than once. It has been always my goal to make it as simple and as light as possible, because when it comes to letting things set out on a lake, I consider complexity and weight enemies of safety. The simplicity required a single propulsion system that would work on land and water alike, and I have eventually came up with one, using double Exo-force wheels, just like in my previous LIME vehicle.
The vehicle was build on two 51x12x6 floating hulls, which only have studs on top so I have added a simple studless central brace on their sides and bottom. Even with the brace, the whole construction was threatening to break in half. The propulsion consisted of four PF Medium motors geared down 3:1, because I expected each wheel to handle various stress when driving off the lake’s bank and back; some wheels would be operating in water while others would already be on the ground. One solution was to make a 4×4 propulsion system with differentials, but I decided it would be too complex. The 3:1 gear ratio was a necessary compromise and didn’t work very well. The vehicle lacked torque while driving and speed while sailing. A gearbox would be an ideal solution here, but again, it was too complex. In the end it turned out that I was right about keeping weight to minimum, because with the camera installed on board, one of the hull was on the very verge of sinking.
The entire construction was designed for easy transportation, and each wheel could be easily detached together with the support which kept it away from the hull, minimizing the risk of splashing water on the hull. The whole vehicle was controlled by the RC unit to avoid problems with the IR link that would be inevitable with the Power Functions system. Skid steering was used on both land and water, with two left motors connected to RC unit’s primary output and two right motors connected to RC unit’s auxiliary output.
The vehicle was extremely simple and crude, but worked as intended, although with a very modest performance. Incidentally, its propulsion system proved to be completely litter-proof; the wheels have been able to clear the way out of any algae, sticks and other objects found near a lake’s bank, and they practically eliminated the risk of the vehicle being stranded. I consider it a proof of concept rather than a proper MOC, but it was an interesting experience.





Hello!
I admire your work, keep it up!
So this one of your models is an eye-opener for me!
1. You can seperate these outdor-LegoRacers so that you have th RC-Unit apart from everything! (Did not know that, they seemed to be in just “one-big-piece”, but it’s LEGO..what did I think 🙂
2. You can combine this RC-Unit with other “Power-Function-Products”
So.. what is more fun:
To build with the Power-Function Products with IR-Control?
Or to build with this Radio-Control-Unit?
I guess the main difference is that one is rather for indoor whilst the other is for outdoor ?
@NXT45
I guess they’ve seen some weird guy sending some weird boat on a lake.
why are the people scared in the video?
@Random Man
They are much heavier and much less as efficient as paddle wheels.
I made a stupid tiny 6×6 trial truck like forever ago. It was powered by a handheld battery box and it couldn’t steer, only forwards/backwards using the 47154 old technic motor and 6582 balloon tires/rims. VERY basic. I found that if I drove it into deep enough water (like my pool or a swamp) the tire/rim seal and the air trapped in the underside of the bricks were enough to keep the motor just barely above the water level. The propulsion wasnt great because the wheels were completely submerged, but it sorta worked as an unintentionally amphibious vehicle. Maybe on a larger rig like yours you could use some bigger tires like power pullers or something.
@andy
I used RC unit to have radio control, which has far better range than PF IR link, especially outdoors. It’s actually explained in the description here.
you don’t need a rc unit for 4m motors.
you can just use a pf batterybox.
btw, isn’t the rc unit really heavy?
@Sebastian omg ! The video says that Paul buys his parts at Bricklink.com and you asked “where you can buy the parts ?”. The FAQ pages are definitively useless… I have the same problem Paul and it upsets me. In any case, good construction !
@Sebastian
Here: http://www.bricklink.com/catalogItem.asp?P=59521
Hi sariel! I got a question about this awesome contrution… Those wheels you used where can i buy them? Or whats the name of it ? I’d been searching around the web but i couldn’t find anything.
Thanks in advance!
Keep up that good work!
@Zac
ive tried that before, with 2 1×3 liftarms on each track segment. you need either a high gear reduction or high torque motor to actually move on land, but the resulting traction, especially over off-road surfaces, is insane
You might be able to make a more efficient amphibious wheel by using tracks and attaching a plate of sorts to the track creating a larger surface area to push water with, although I don’t know how well that will work on land.
@chandu
Nope. They simply bend.
why are the wheels offset???
does the negative camber help it move in the water?
@Alex
Thanks Alex. Actually, as a LEGO Ambassador I know CUUSOO very well and that’s why I won’t be putting any project there, but thanks anyway.
@Sariel don’t worry my friend! if you reach 10,000 supports they will make a review of your model and change parts in order to make it go into production! have a look at Lego.CUUSOO website!
Maybe you could try a propulsion system like the DUKW – shift power from the tires to a set of propellers and a rudder.
if you do make something more elaborate even though you think simplicity is key here you could use the mindstorm and program it with a compas senser to go back to shore when the signal is lost or something goes wrong
@Alex
Do you realize it uses discontinued parts, such as the RC unit? LEGO doesn’t produce it anymore, and they certainly won’t start because of CUUSOO.
@Phoxtane
Who knows, maybe one day. It would need larger displacement though.
Are you considering building an improved version or “proper” amphibious MOC in the future? I’m quite interested in this line of thinking.
This is great! I vote for this to go on Lego.CUUSOO !! I promise I will support it 🙂