Kenworth Road Train

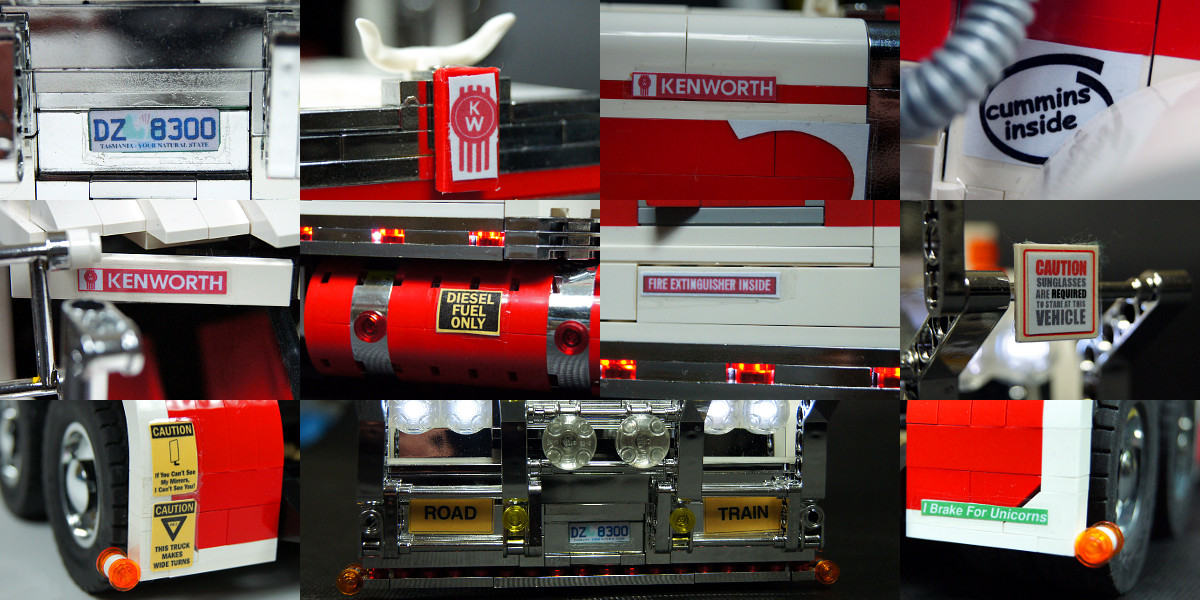
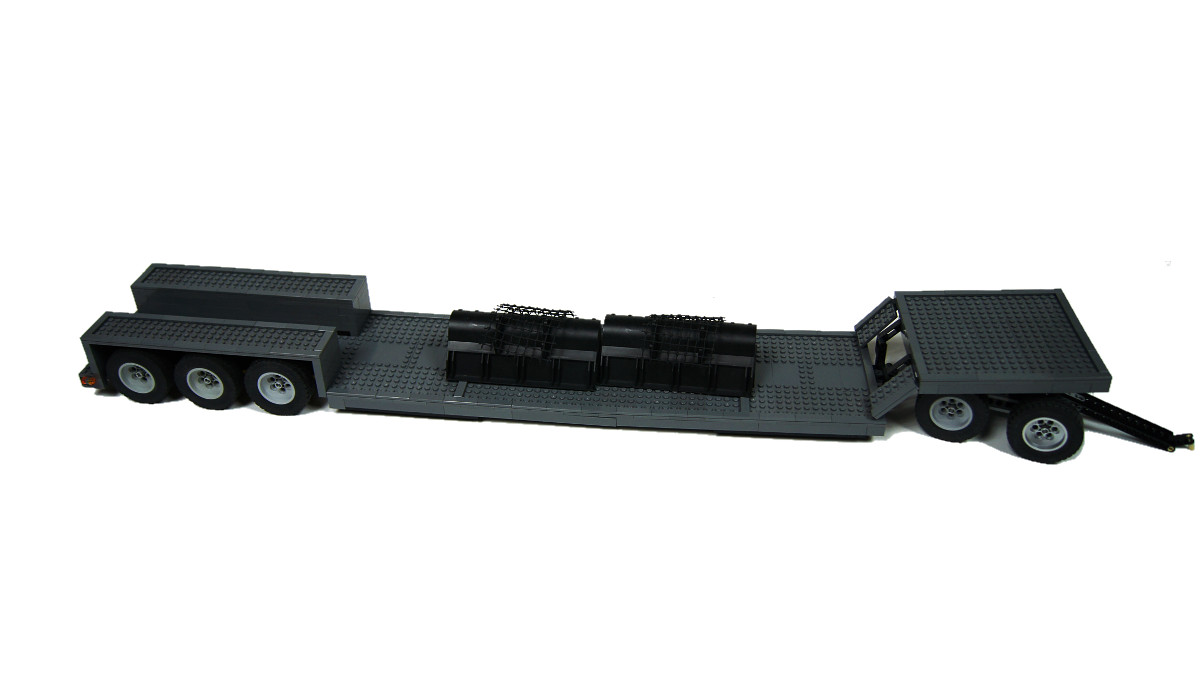
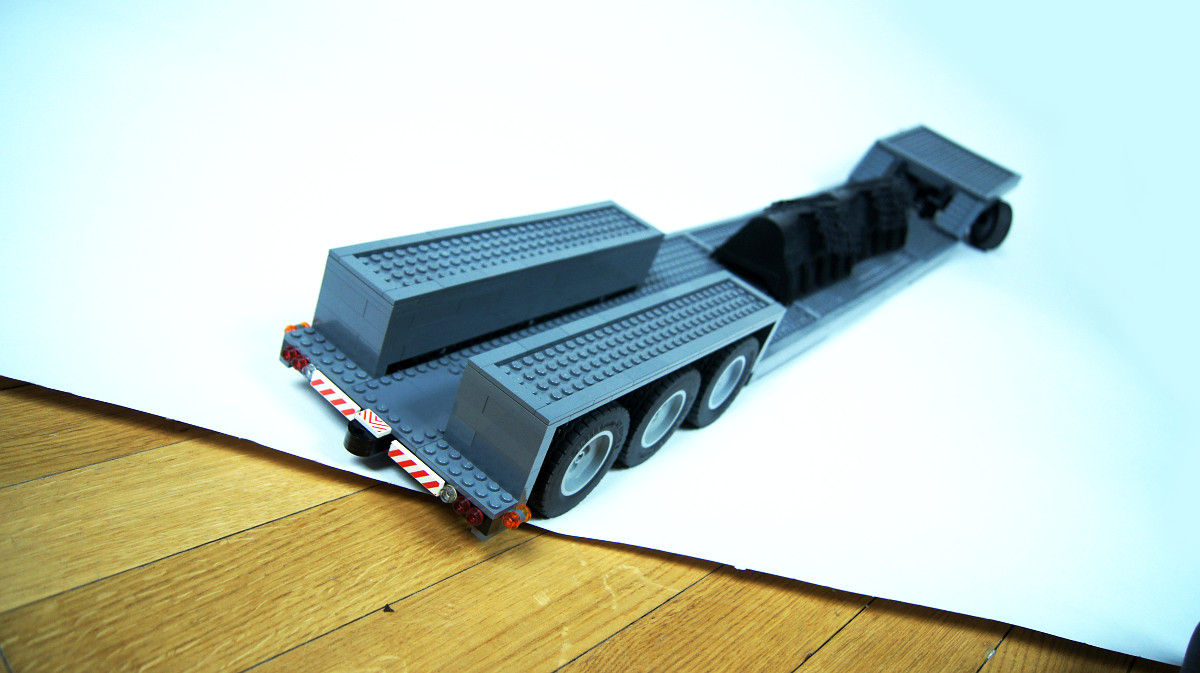
Model of the Kenworth T900 truck in the Australian road train variant. Features proportional steering using the NXT unit, remotely locked fifth wheel, working turn signals, three trailers, lights and custom stickers.
Datasheet:
Completion date: 14/05/2012
Power: electric (Power Functions / NXT)
Dimensions: truck: length 67 studs / width 20 studs / height 31 studs, trailer #1: length 103 studs / width: 18 studs / height: 28 studs, trailer #2: length 122 studs / width 18 studs / height 9 studs, trailer #3: length 97 studs / width 18 studs / height 24 studs
Weight: truck: 2.891 kg, trailer #1: 2.378 kg, trailer #2: 1.440 kg, trailer #3: 2.194 kg
Suspension: none
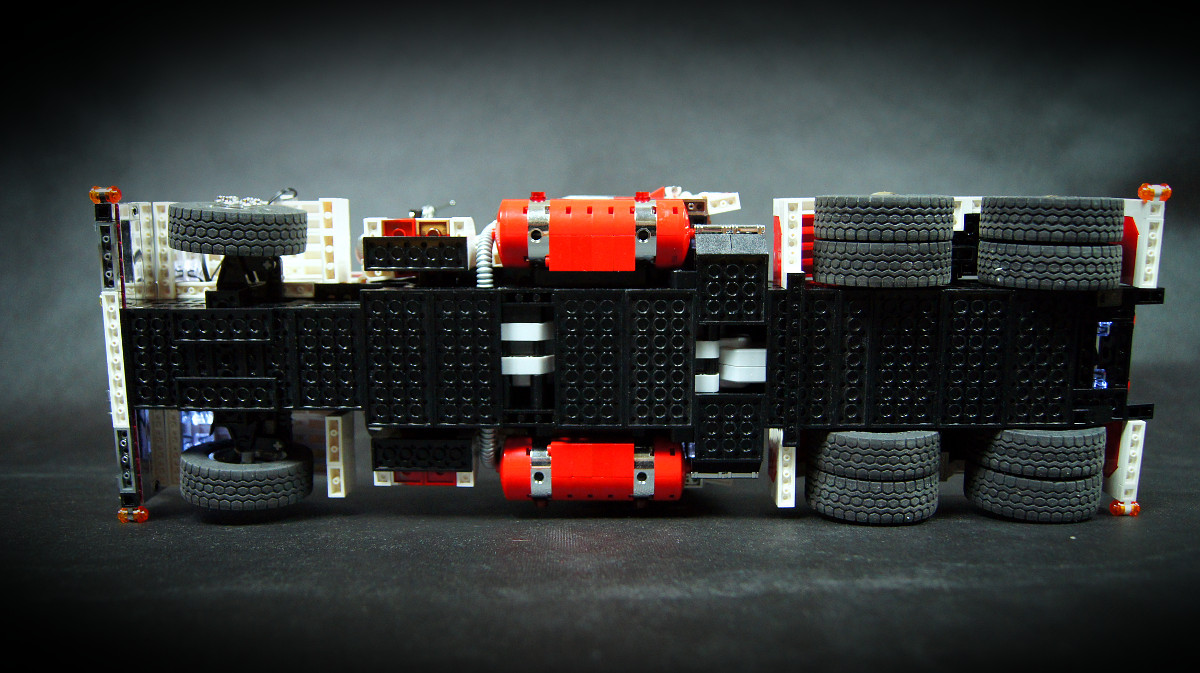
Propulsion: 1 x NXT motor geared 3:1
Motors: 3 x NXT motor
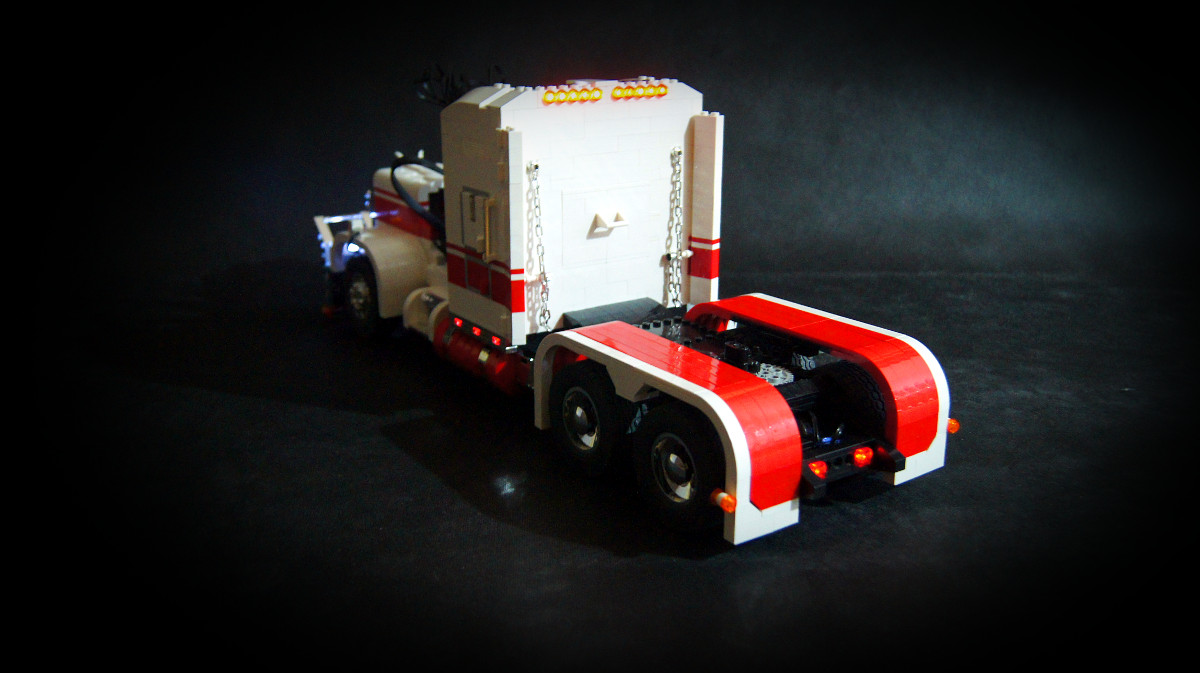
This model was based on the Kenworth T900 truck converted to an Australian road train version. At the same time, it was an experiment on merging NXT functionality with a Model Team look.
I have started by modeling a pure T900 truck, adding some modifications typical for road trains along the way. The result is neither a stock Kenworth T900 nor a classic road train, but it still fits within the wide array of customizations popular among Australian drivers (and sheep).
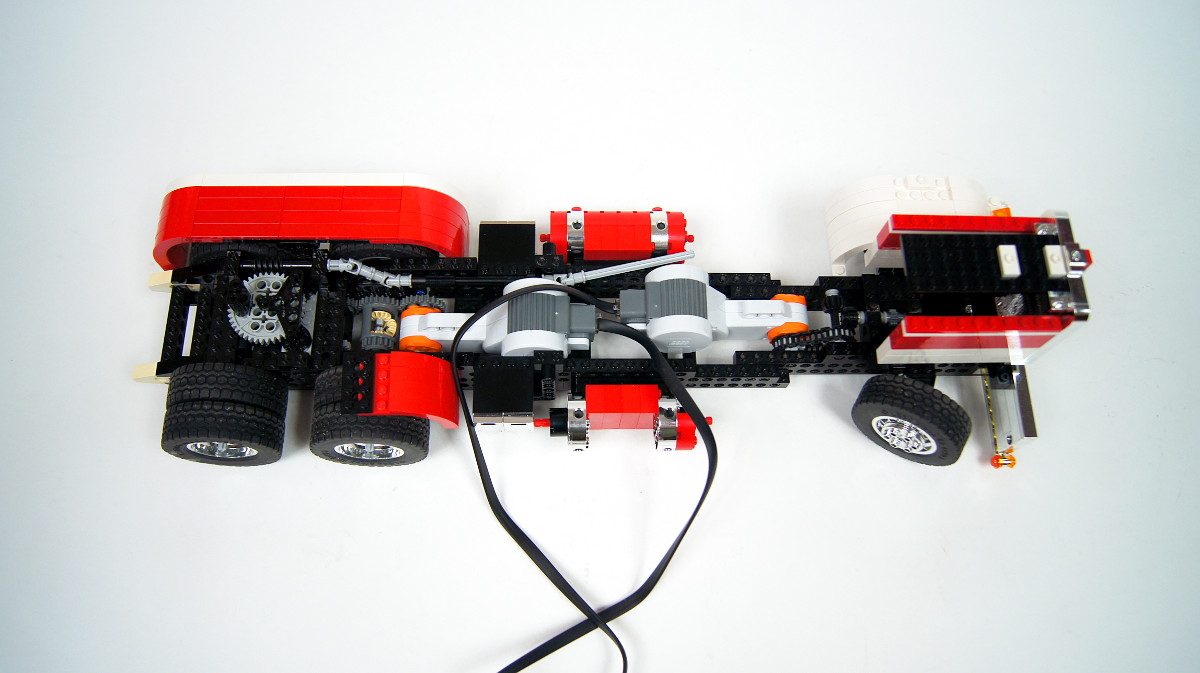
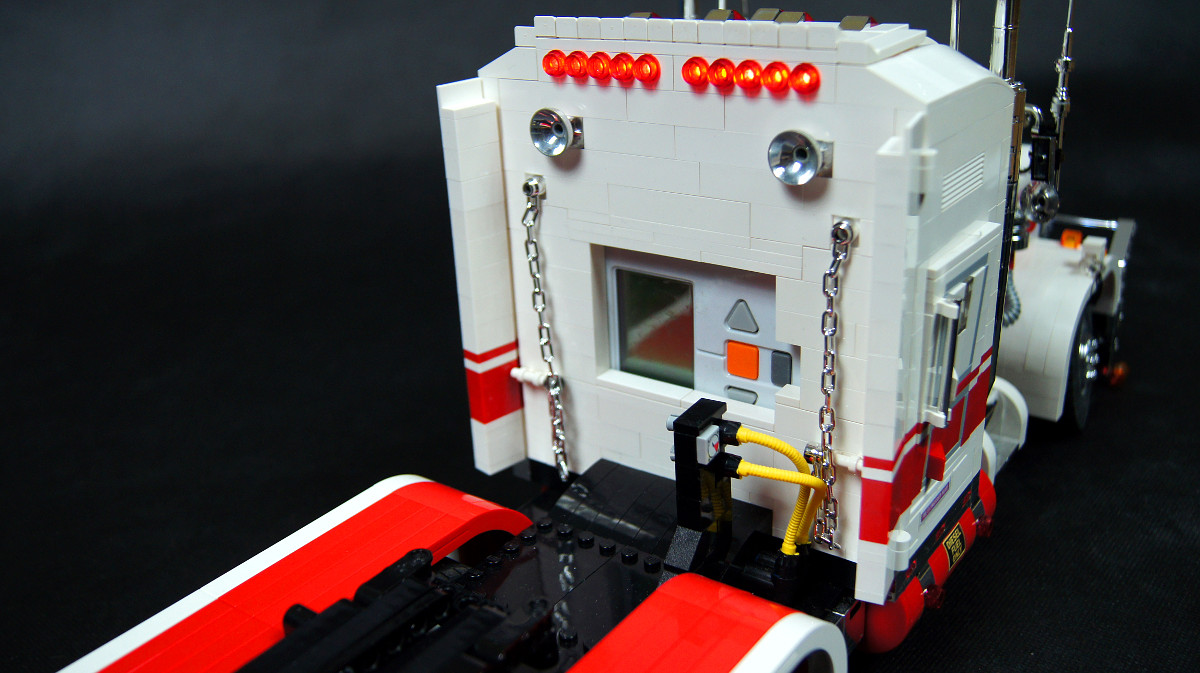
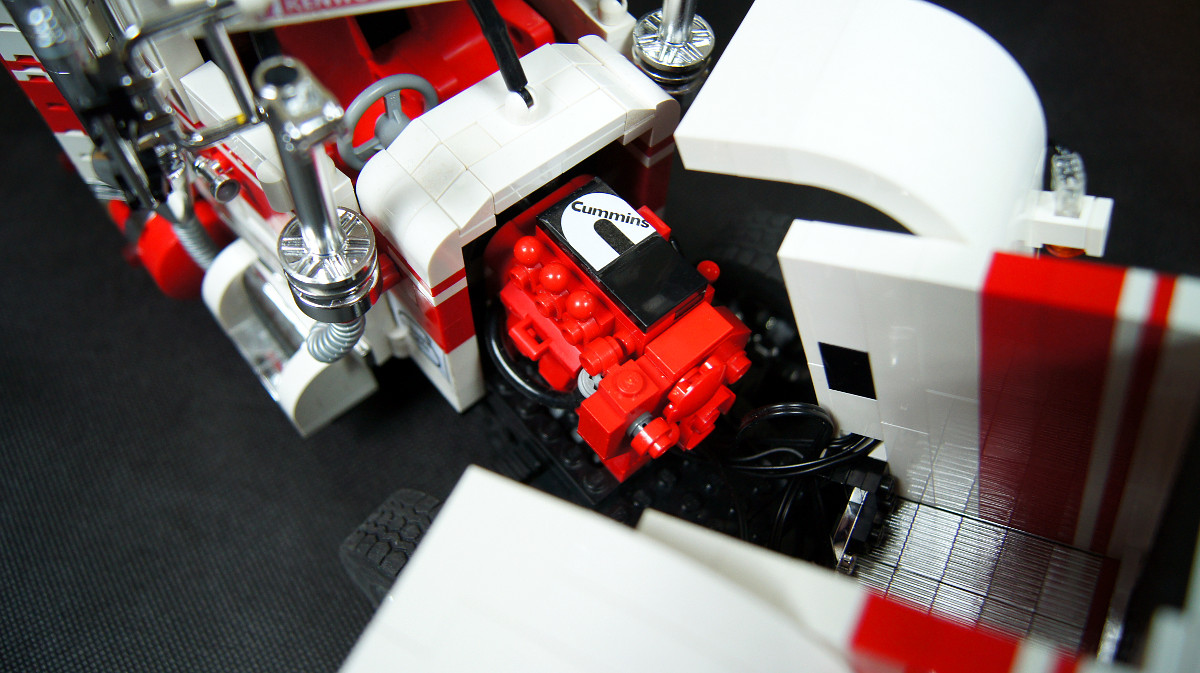
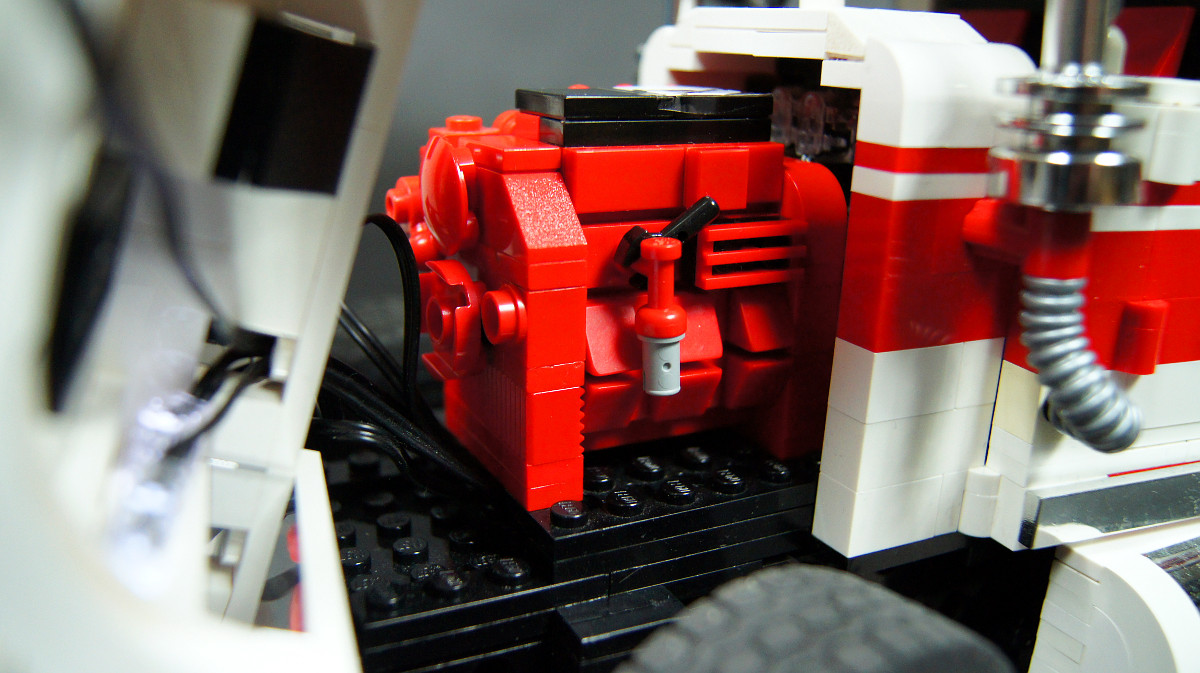
The heart of the model was a NXT unit located at the back of the sleeper module. Since the chassis was entirely taken by two NXT motors (yes, they are this big), the sleeper was actually where almost all mechanical and electric elements were housed. Among them was a third NXT motor used to lock and unlock the fifth wheel, the 8878 rechargeable Power Functions battery for powering lights and turn signals, a Power Functions IR receiver for controlling the turn signals and HiTechnic IR Link sensor for allowing the NXT unit to send commands to the IR receiver.
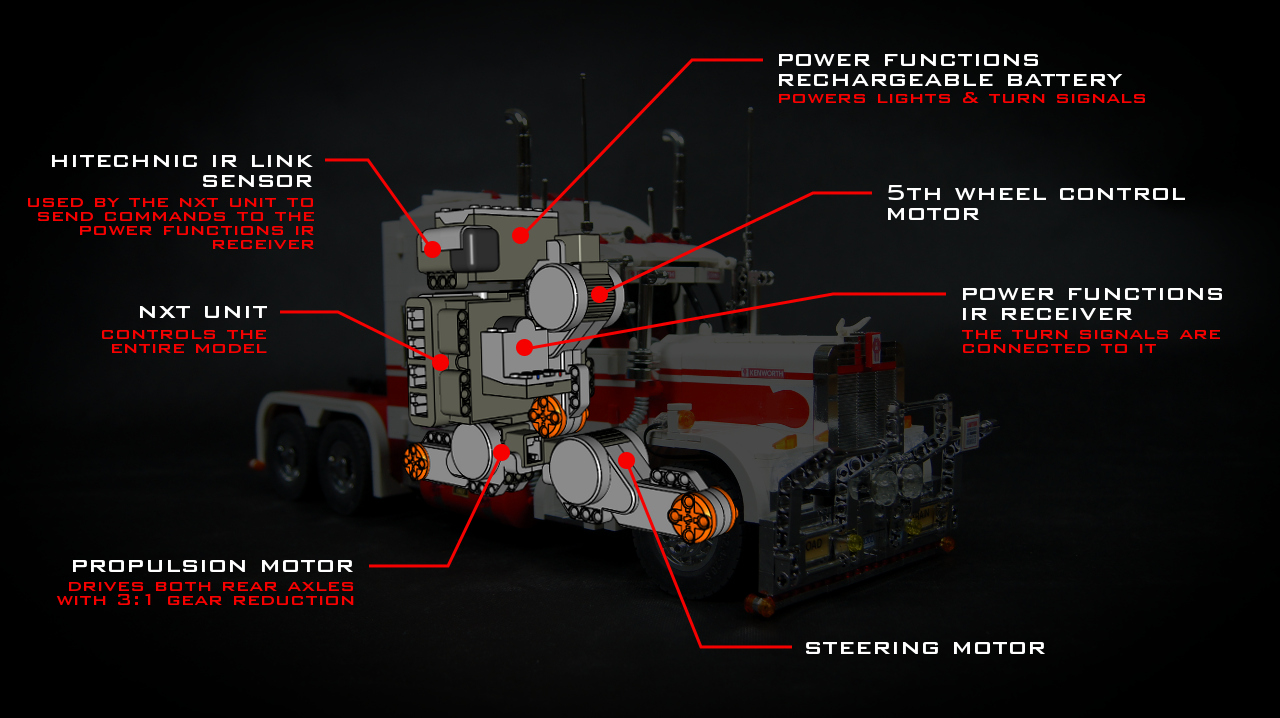
It may come as a surprise that the model had an IR receiver housed inside next to the IR link sensor, but it resulted from sensor’s poor IR range. I was initially hoping to be able to install the sensor on an external NXT controller, thus having a chance to add IR receivers and turn signals in the trailers too, but with a model of that size the sensor simply wouldn’t reach the truck and all trailers at the same time. Also, with all the effort put into steering the model over a Bluetooth link, it would be a waste to be limited by the poor IR range.
The model had just a few functions. Both rear axles were driven by a single NXT motor geared 3:1, and the front axle was steered by another NXT motor without a clutch. There was no suspension, as it would affect the look of the model and it was hardly needed since it was never supposed to leave my apartment’s floor. The fifth wheel was locked and unlocked using a horizontal 40-tooth gear with a short beam on its side, driven by the third NXT motor located in the sleeper. By rotating the wheel, the beam would block and unblock the fifth wheel’s only “exit”.
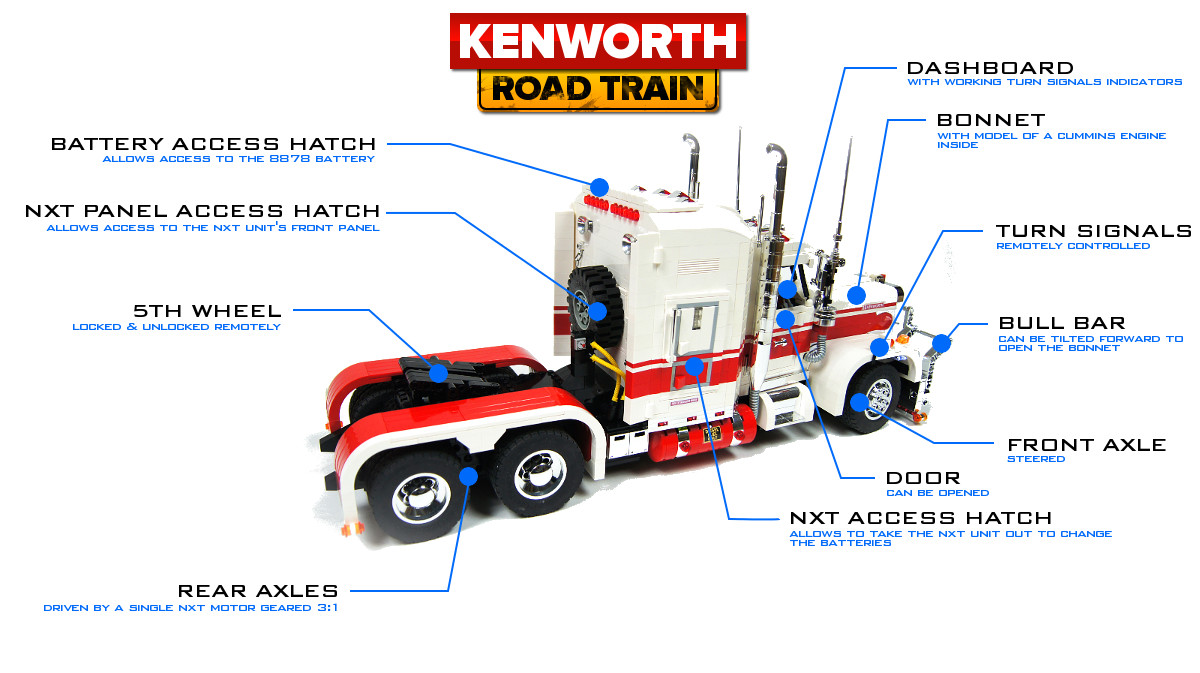
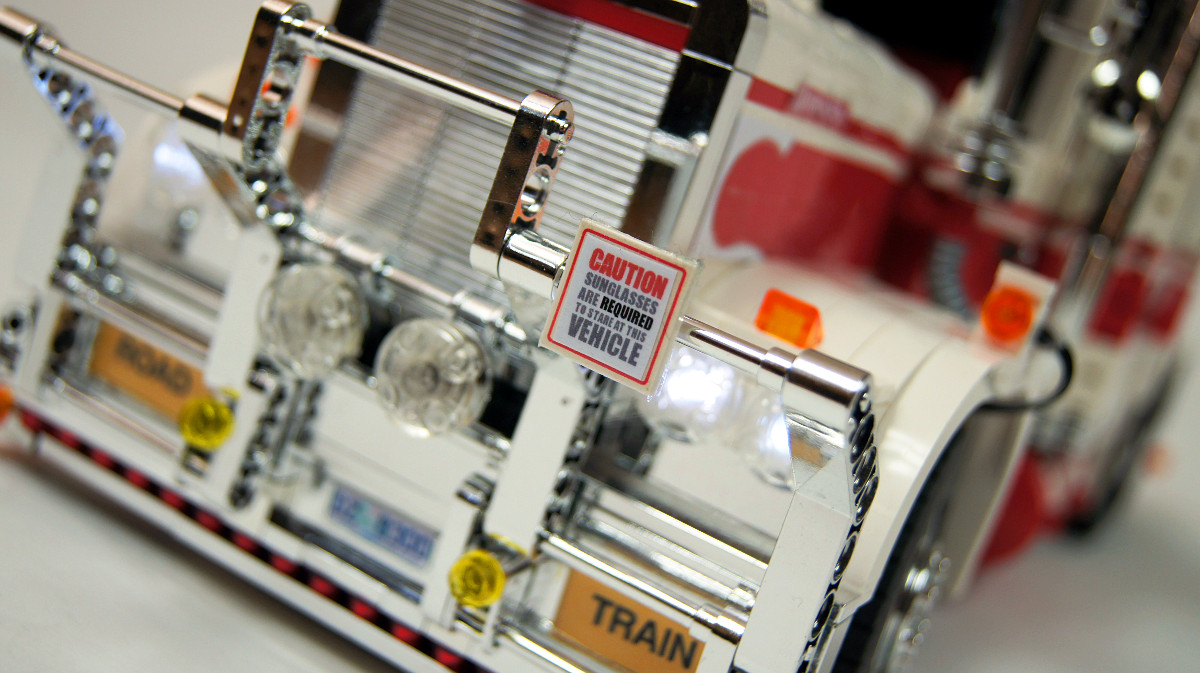
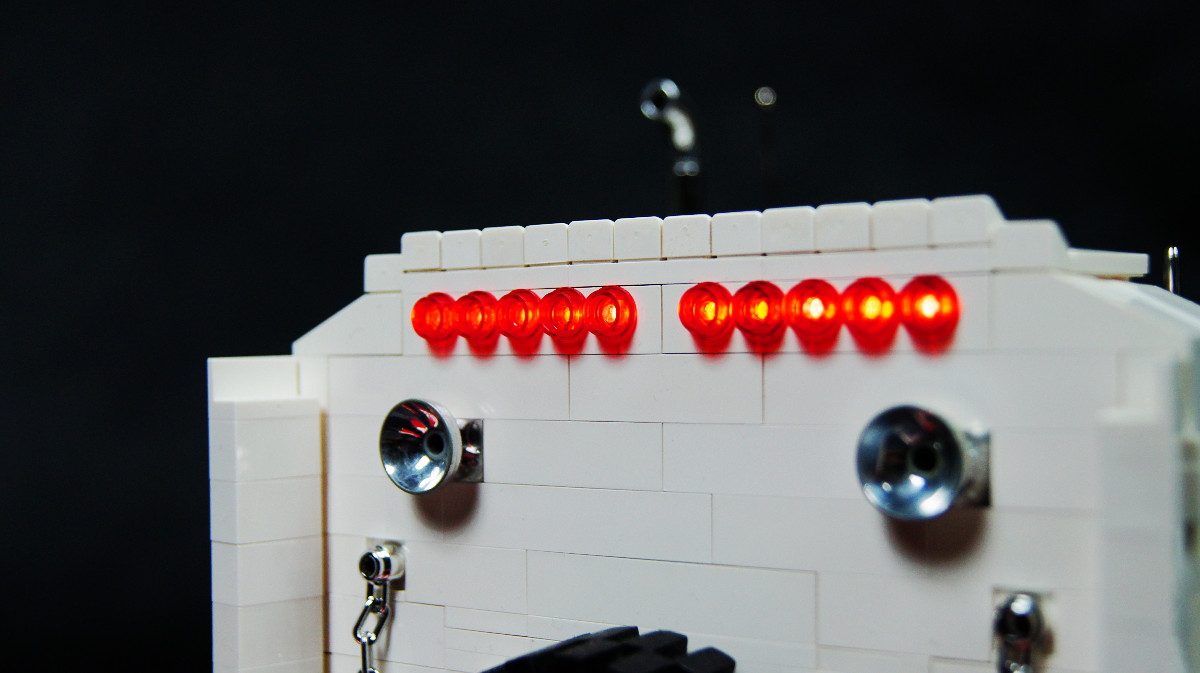
The front turn signals were controlled remotely and operated by the software, that is by the NXT unit turning them on and off repeatedly using the IR Link sensor. I did not install rear or any other turn signals for the fear of compromising the truck’s look with too many exposed wires and LEDs, but I have added working turn signals indicators on driver’s dashboard. I have also used the speaker of the truck’s NXT unit to honk (or rather beep) on command, and to beep while on reverse. It was a very simple thing and I have omitted it when trying to shorten the video.
The sleeper module was literally bursting at seams with electric elements and wires. There were three access hatches in it: top one for the 8878 battery, rear one for the NXT unit’s front panel, and a side one for taking the entire NXT unit out for battery replacement. The wires, especially the stiff NXT wires, proved problematic because they had to be arranged so as to allow moving the NXT unit out and back in. Eventually, the whole space at the back of the cabin was taken by wires and the side access hatch tended to stick out a little.
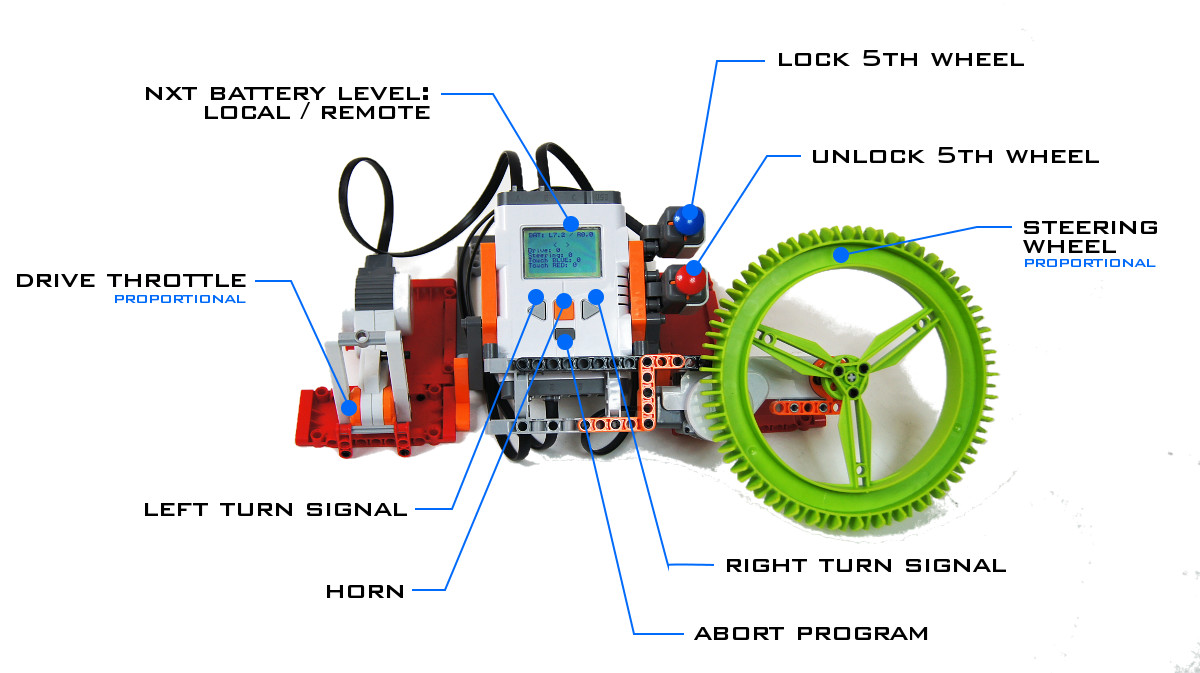
The entire set-up, that is the truck and three trailers, was controlled by a very simple external controller using another NXT unit. I have initially attempted to use the Hailfire Droid’s wheel as a steering wheel, but it proved unusable because using it to drive any regular gear wheel created very high gear acceleration which generated plenty of resistance. Gearing down in the latter stage was not an option, as a very considerable backlash in gear wheels was created. I was also tempted to build a pedal-like device to control the throttle, but with the NXT wires being quite short and impossible to connect in series, it proved pointless – I would have to keep such a pedal right next to the NXT unit.
The controller was a variation of my NXT brick-to-brick remote, allowing proportional steering and drive with a speed control, as well as controlling all the remaining functions with touch sensors and NXT unit’s buttons. It was running the RobotC software, resulting in delay in the other NXT unit’s reactions over Bluetooth link. A secondary, more comfortable way of controlling the model was to use a computer with a gaming pad. Using a Bluetooth link and the RobotC software, it allowed to control the model with minimum delays and the gaming pad provided plenty of buttons and two analog joysticks which were used for speed-control for both drive and steering.

I was not fully happy with the model. Its functionality was troublesome, with a lot of effort required to start and connect the two NXT units, with delays in steering, and most importantly with the enormous amount of space taken by the NXT elements. Its look was somewhat compromised, with some simplifications in the bonnet and cabin’s roof area, and with the side air filters shortened to allow to open the bonnet up – the only alternative here was to cut the front bumper to move the bonnet’s hinge lower, which I didn’t want to do. I was afraid it was the kind of model that makes a good first impression, and goes downhill from there. Still, it was an interesting experience in using the NXT elements and in merging them with the PF ones.
Gaming pad control program:
#pragma config(Sensor, S4, HTIRL, sensorI2CCustom)
#include "drivers/HTIRL-driver.h"
#include "JoystickDriver.c"
tPFmotor SignalLeft = pfmotor_S4_C1_A;
tPFmotor SignalRight = pfmotor_S4_C1_B;
task Signals()
{
while(true)
{
if(joy1Btn(2) == 1)
{
PFMotor(SignalRight, 7);
nxtDisplayCenteredTextLine(5, " < [>]");
}
else if(joy1Btn(4) == 1)
{
PFMotor(SignalLeft, 7);
nxtDisplayCenteredTextLine(5, "[<] > ");
}
else
{
PFMotor(SignalRight, 0);
PFMotor(SignalLeft, 0);
nxtDisplayCenteredTextLine(5, " < > ");
}
wait1Msec(250);
PFMotor(SignalRight, 0);
PFMotor(SignalLeft, 0);
}
}
task main()
{
bMotorReflected[motorB] = true;
bMotorReflected[motorC] = true;
StartTask(Signals);
while(true)
{
getJoystickSettings(joystick);
motor[motorB] = 0;
motor[motorC] = 0;
motor[motorC] = joystick.joy1_y1 / 1.28;
motor[motorB] = joystick.joy1_x1 / 1.28;
nxtDisplayCenteredTextLine(0, "BATTERY: %3.1fV", nImmediateBatteryLevel / (float) 1000);
nxtDisplayTextLine(2, "B: %d", motor[motorB]);
nxtDisplayTextLine(3, "C: %d", motor[motorC]);
if(joy1Btn(1) == 1)
motor[motorA] = -100;
else if(joy1Btn(3) == 1)
motor[motorA] = 100;
else
motor[motorA] = 0;
}
}
NXT-to-NXT control sender program:
#pragma config(Sensor,S1,touch1,sensorTouch)
#pragma config(Sensor,S2,touch2,sensorTouch)
bool leftturn = false;
bool rightturn = false;
bool soundhorn = false;
task BatLev()
{
ubyte valueReceived[1];
valueReceived[0] = 0;
while(true)
{
cCmdMessageRead(valueReceived, 1, 1);
nxtDisplayCenteredTextLine(0, "BAT: L%3.1f / R%3.1f", nImmediateBatteryLevel / (float) 1000, valueReceived[0] / (float) 10);
wait1Msec(50);
}
return;
}
task Buttons() //0 = Gray Rectangle 1 = Right Arrow 2 = Left Arrow 3 = Orange Square
{
nNxtButtonTask = -2;nNxtExitClicks = 2;
nxtDisplayCenteredTextLine(2, " < > ");
while(true)
{
if(nNxtButtonPressed == 1)
{
if (rightturn == false)
{
nxtDisplayCenteredTextLine(2, " < [>]");
rightturn = true;
leftturn = false;
}
else
{
nxtDisplayCenteredTextLine(2, " < > ");
rightturn = false;
leftturn = false;
}
}
else if(nNxtButtonPressed == 2)
{
if (leftturn == false)
{
nxtDisplayCenteredTextLine(2, "[<] > ");
rightturn = false;
leftturn = true;
}
else
{
nxtDisplayCenteredTextLine(2, " < > ");
rightturn = false;
leftturn = false;
}
}
else if(nNxtButtonPressed == 3)
{
soundhorn = true;
}
wait1Msec(350);
}
}
task main()
{
StartTask(BatLev);
StartTask(Buttons);
bFloatDuringInactiveMotorPWM = true;
btConnect(1, "NXT2");
while(true)
{
ubyte valueToSend[7];
valueToSend[0] = nMotorEncoder[motorA];
valueToSend[1] = nMotorEncoder[motorB];
valueToSend[2] = SensorValue(touch1);
valueToSend[3] = SensorValue(touch2);
valueToSend[4] = rightturn;
valueToSend[5] = leftturn;
valueToSend[6] = soundhorn;
cCmdMessageWriteToBluetooth(valueToSend, 7, 1);
nxtDisplayTextLine(3, "Drive: %d", valueToSend[0]);
nxtDisplayTextLine(4, "Steering: %d", valueToSend[1]);
nxtDisplayTextLine(5, "Touch BLUE: %d", valueToSend[2]);
nxtDisplayTextLine(6, "Touch RED: %d", valueToSend[3]);
wait1Msec(50);
}
}
NXT-to-NXT control receiver program:
#pragma config(Sensor, S4, HTIRL, sensorI2CCustom)
#include "drivers/HTIRL-driver.h"
tPFmotor SignalLeft = pfmotor_S4_C1_A;
tPFmotor SignalRight = pfmotor_S4_C1_B;
// config start
//bMotorReflected[motorA] = true;
//bMotorReflected[motorB] = true;
//bMotorReflected[motorC] = true;
bool buzzOnRev = true; // buzzing while on reverse
int steerAcc = 10; // steering accuracy margin (degrees)
// config end
int turnSignals = 0;
task Signals()
{
while(true)
{
if(turnSignals == 1)
{
PFMotor(SignalRight, 7);
}
else if(turnSignals == 2)
{
PFMotor(SignalLeft, 7);
}
else
{
PFMotor(SignalRight, 0);
PFMotor(SignalLeft, 0);
}
wait1Msec(250);
PFMotor(SignalRight, 0);
PFMotor(SignalLeft, 0);
}
wait1Msec(50);
}
task BatLev()
{
while(true)
{
nxtDisplayCenteredTextLine(0, "BAT: L %3.1fV", nImmediateBatteryLevel / (float) 1000);
ubyte valueToSend[1];
valueToSend[0] = nImmediateBatteryLevel / (float) 100;
cCmdMessageWriteToBluetooth(valueToSend, 1, 1);
wait1Msec(50);
}
return;
}
task main()
{
StartTask(BatLev);
StartTask(Signals);
nVolume = 3; // starting volume
ubyte valueReceived[7];
valueReceived[0] = 0;
valueReceived[1] = 0;
valueReceived[2] = 0;
valueReceived[3] = 0;
valueReceived[4] = 0;
valueReceived[5] = 0;
valueReceived[6] = 0;
while(true)
{
cCmdMessageRead(valueReceived, 7, 1);
nxtDisplayTextLine(2, "Drive: %d", valueReceived[0]);
nxtDisplayTextLine(3, "Steering: %d", valueReceived[1]);
nxtDisplayTextLine(4, "Touch BLUE: %d", valueReceived[2]);
nxtDisplayTextLine(5, "Touch RED: %d", valueReceived[3]);
// motorC (drive)
motor[motorC] = 0;
int afactor = valueReceived[0] / 5;
if (afactor > 1 && afactor < 25)
{
afactor = afactor * 10;
if (afactor > 100) afactor = 100;
motor[motorC] = afactor;
if (buzzOnRev == true) PlaySound(soundException);
}
else if (afactor > 1 && afactor > 25)
{
afactor = (51 - afactor) * -10;
if (afactor < -100) afactor = -100;
motor[motorC] = afactor;
if (buzzOnRev == true) ClearSounds();
}
// motorB (steering)
motor[motorB] = 0;
int bfactor = valueReceived[1];
if (bfactor > 1 && bfactor < 75) bfactor = bfactor;
else if (bfactor > 1 && bfactor > 75) bfactor = (256 - bfactor) * -1;
nxtDisplayTextLine(7,"Mtr B: %d/%d",nMotorEncoder[motorB], bfactor);
bfactor = bfactor * 4;
if (nMotorEncoder[motorB] < (bfactor + steerAcc)) while(nMotorEncoder[motorB] < bfactor) motor[motorB] = 10;
else if (nMotorEncoder[motorB] > (bfactor - steerAcc)) while(nMotorEncoder[motorB] > bfactor) motor[motorB] = -10;
else motor[motorB] = 0;
// motorA
motor[motorA] = 0;
if (valueReceived[2] == 1) motor[motorA] = 100;
else if (valueReceived[3] == 1)motor[motorA] = -100;
// turn signals
if (valueReceived[4] == 1) turnSignals = 1;
else if (valueReceived[5] == 1) turnSignals = 2;
else turnSignals = 0;
// horn
if (valueReceived[6] == 1) PlayTone(784, 50);
else ClearSounds();
wait1Msec(50);
}
}

















































@AlexandreLuiz
And where would I get them from? I didn’t build this model in LDD.
I want build that thing in Lego Digital Designer, Give me the truck building instructions
@Rage Hobbit
I have used RobotC. There are many RobotC tutorials online if you just search for them.
Very neat truck, especially considering the unique control system. I wish to do the same with a custom vehicle; do you have any more information on how to control the NXT with the remote, such as software, connections, etc.?
The front part on the image there is what is causing me the problem. Thanks for your help!
@Old Man Jenkins
I think this picture shows it all. You can see an 8-teeth gear on the rack there, too: http://www.brickshelf.com/gallery/Sariel/KenworthRoadTrain/WIP/dsc08417.jpg
The actual rack and steering and how you got the 12t double bevel gears to mesh, and how the actual rack got power. I only have the 8M rack, so I also need some advice on how to make it longer.
@Old Man Jenkins
Which part is causing the trouble?
Can you describe the steering better? I’m trying to build a steering with the nxt motor like how you did here, but i failed every time i tried (5 times).
@Lego man
I’m pretty sure you can built it from photos if you try.
Hello can I get instructions or some way to build that fifth wheel. And pin type
@Benedikt
I don’t remember where I got a driver for it from, but 3 seconds of using Google gets you this driver: http://www.breigh.com/xander/HTIRLink-driver-1_1.c