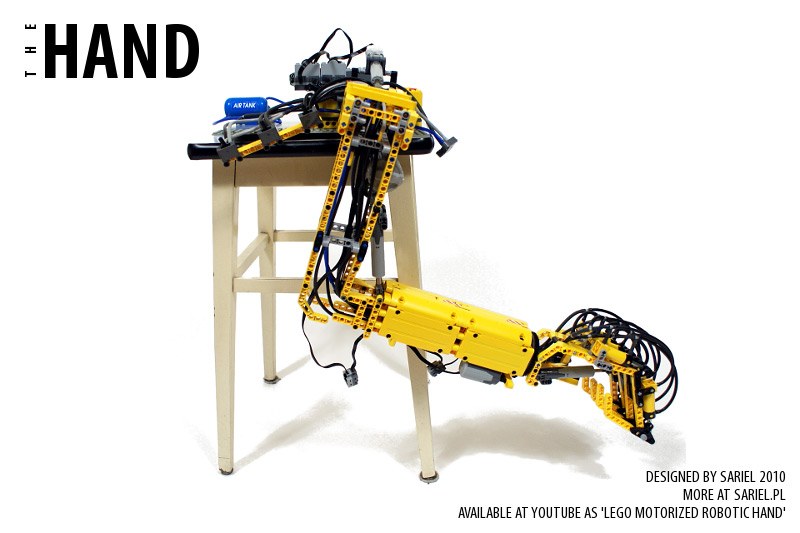
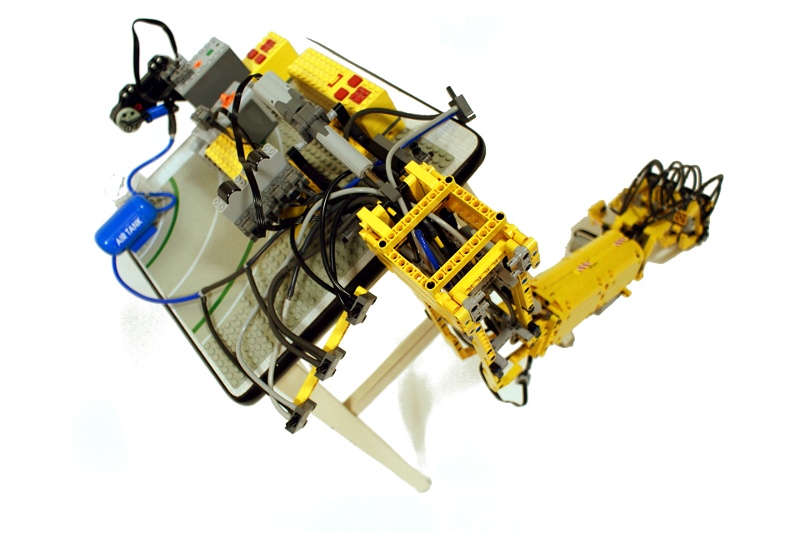
Robotic Hand

Model of a human arm. Features 4 electric and 4 pneumatic functions.
Datasheet:
Completion date: 28/02/2010
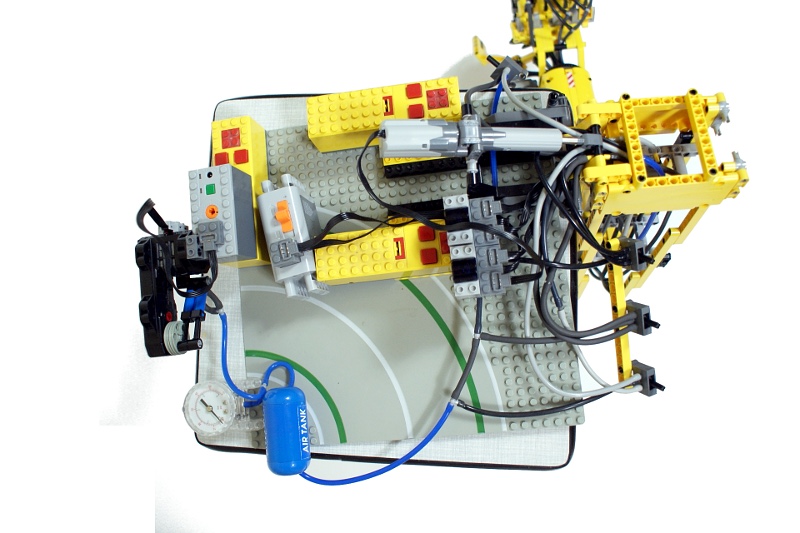
Power: electric (Power Functions) / pneumatic (fed from external pneumatic compressor with an airtank)
Dimensions: unknown
Weight: unknown
Suspension: none
Motors: 3 x PF Medium, 1 x PF XL, 1 x RC
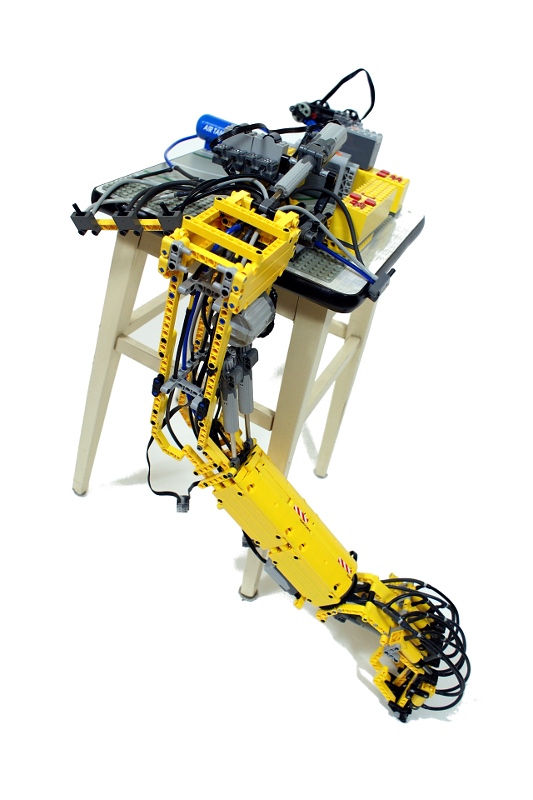
Just another weekend build – this is basically a late realization of an idea I had back when I was a kid. The goal was to build a model of an entire human arm, with palm included, that would have as much realistic functions as possible while being of more or less accurate size. The look of the arm was considered insignificant.
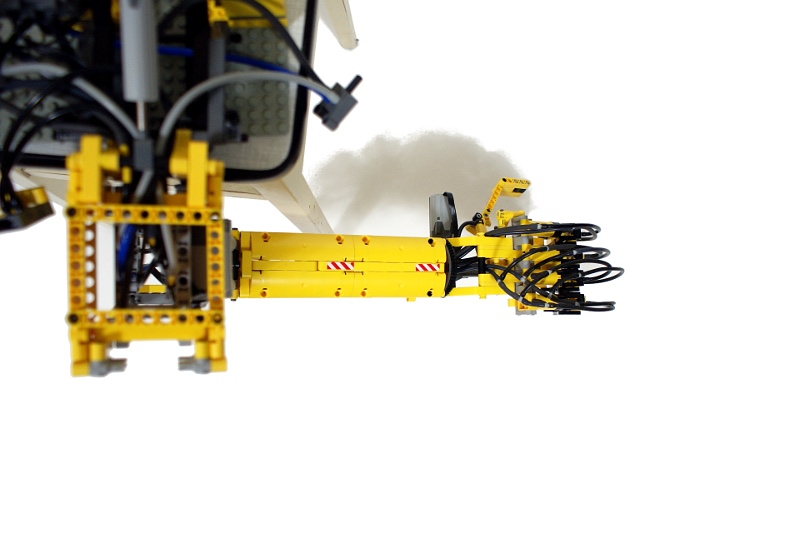
The most complex part of the arm is obviously the palm with 4 fingers and a thumb. The thumb can be bent and raised/lowered, whereas the remaining 4 fingers have two joints in each of them. The index finger was operated independently, and it was fairly possible to operate every finger individually, except that it would take two times more pneumatic hoses, which were already quite numerous (8 of these was going through the arm). The palm can be theoretically rotated through full 360 degrees, but I never actually tried it for the sake of the hoses in the wrist. The whole arm was heavy and a bending under its weight a bit, but it worked well. I think it was pretty satisfactory for something that was built in just two days.
Photos:





Video:
Media reference:
Brick Tales, Bricks in my Pocket, crave, CrunchGear, Engaget, Fascinating LEGO Model Of The Day, Hack N Mod, Le Journal du Geek, NowhereElse, Sema Geek, Switched, Tamasindo, The Awesomer, The Geek Church, Tinkerology, Tom-Style

@John
You could have just typed that into Google. Here: http://www.bricklink.com/catalogItem.asp?P=67c01
where do i get the air tank?
@War
Everywhere. LEGO, Ebay, Bricklink…
Where did you get those pneumatic cylinders?
Hi, Paul, this is the most impressive LEGO model I have ever seen. I wish I had learnt mechanical not finance 15 years ago, so that I can design such things myself today … HAAA! Thank you so much to sharing with us
hello there is a tpe on bionic arm and your arm would reproduce. have to conclude would like to know the steps to achieve it. thank you in advance
maybe it is a little late reaction but thats not a problem. you said that you you don’t have that much air but with a bottle you come very far. not that 5000 rpms but its the idea. ik make it to. now with the v8. i make an big trailer voor 4 bottles and an compresser, brakes, an gaspadel(i don’t now how to say that). gearbox. maybe it is an idea? like an truck wit an inline 6 end 3 speed gearbox?
@Ruben
I think you’re missing where the air comes from. The engines you have shown need bigger compressor that this hand.
nice idea, you have a lot of pumps and switches. why you don’t modifie it and make a engine that runs on air. like a v8. I make an 3 cilinder in a big american truck. do you make an engine like this to? http://www.lpepower.com/ and http://www.techbricks.nl/My-pneumatic-LEGO-projects/lego-pneumatic-engine-lpe-3-cylinder-inline.html.
Ruben
@lego
I’m not making instruction. Especially not for something that is clearly visible on photos.
Would have kept silent about instruction of your mechanical arm ?
i wonder what are the parts he used
Mam taki sam stołek ;]
@Hugo
I haven’t used any particular model. Good luck building.
Very cool what you’ve done!
I’d like to know what model did you used to build this hand?
I want to build it, too.
I’m wainting your answer.
Marylin Manson “Seizure Of Power”.
Czy mógłbyś podać tytuł tego utworu, który leci w tle? Z góry dziękuję. I gratuluję, jestem pełen podziwu.
@bodek
Tak, jest zbudowana z klocków Lego. Reszty nie ma, od początku miała to być tylko ręka.
Czy ta ręka zbudowana jest z klocków lego? a gdzie jest reszta robota?
@Legot
Because I don’t have one, mainly.
so why do I not see an NXT in this mass of PF hoses?
@samogitian
These are new Technic panels. That’s all you need to know to find them.
What’s the part# of those smooth yellow plates on the forearm?
We got BrickNet by the studs now, don’t we?! :o)
Fantastic build!
OMG LEGO Terminator T-1 is coming O_o
@Sariel
Ok, but pack it carefully so the post service doesn’t damage it. Thanks! ;-P
Kolejnym krokiem byłoby stworzenie rękawicy, dzięki której ruch żywej ręki przekłądałby się na ruch robota 🙂
I´m hoping for a full size human with tons of PF´s in a few days 🙂
Sorry folks, look like you all just got it coming 🙂
Yeah. Sariel’s gonna build lots of PF Its (From the Addams family) and take over the world. (Evil laughter.) 😀
Nice construction!
@Alex
Now that you have discovered his secret, you will have to be eliminated. A Lego robotic arm is coming for you…..
I can’t believe you built this in just a weekend …. Do you have some kind of superhero powers? 🙂