Hyster Forklift

SBrick-controlled model based on a Hyster forklift. Features drive, steering, tilted mast, interchangeable attachments powered by internal pneumatic compressor, lights and custom stickers.
Datasheet:
Completion date: 23/02/2015
Power: electric (8878 battery) / pneumatic (internal motorized compressor)
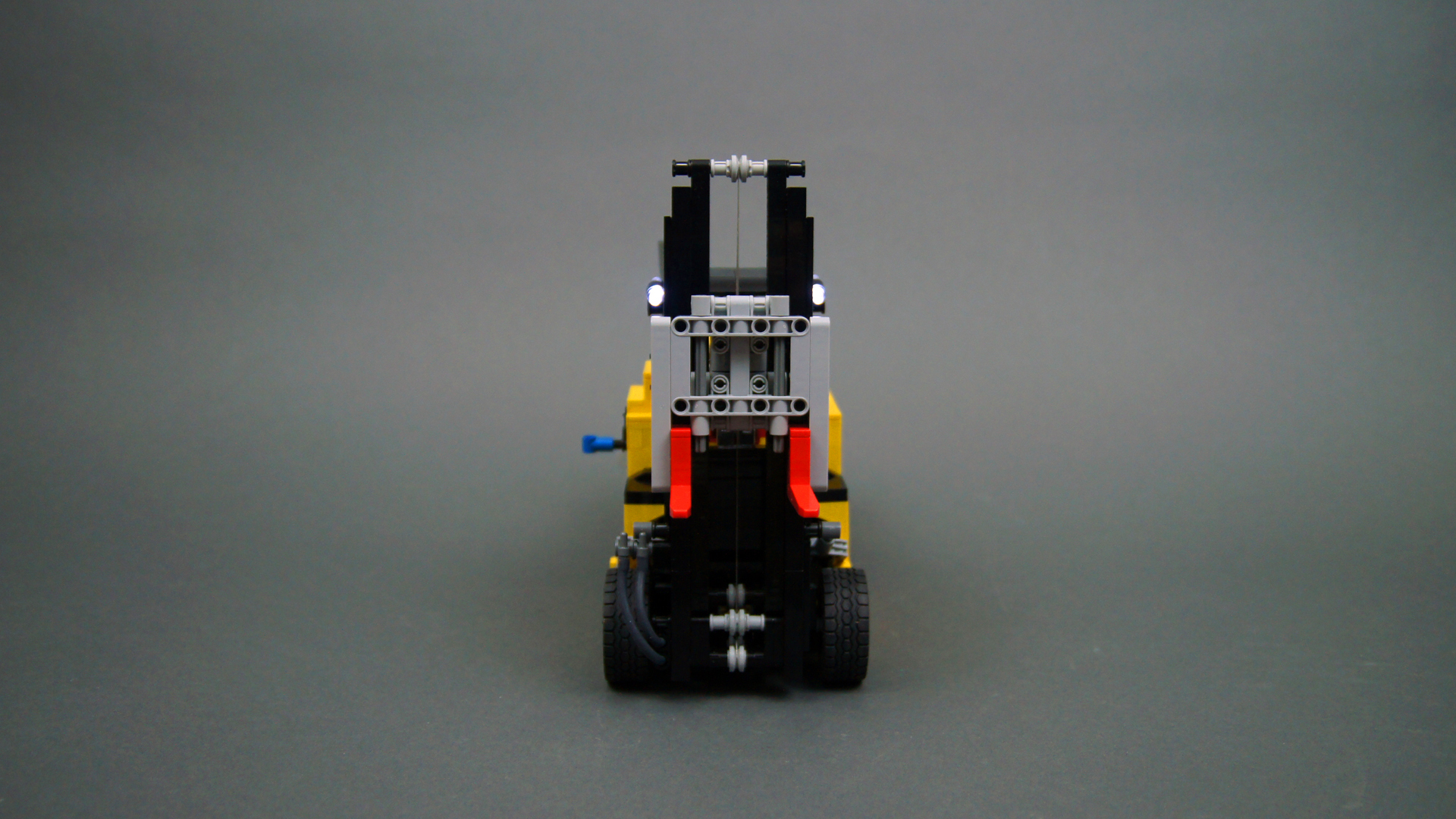
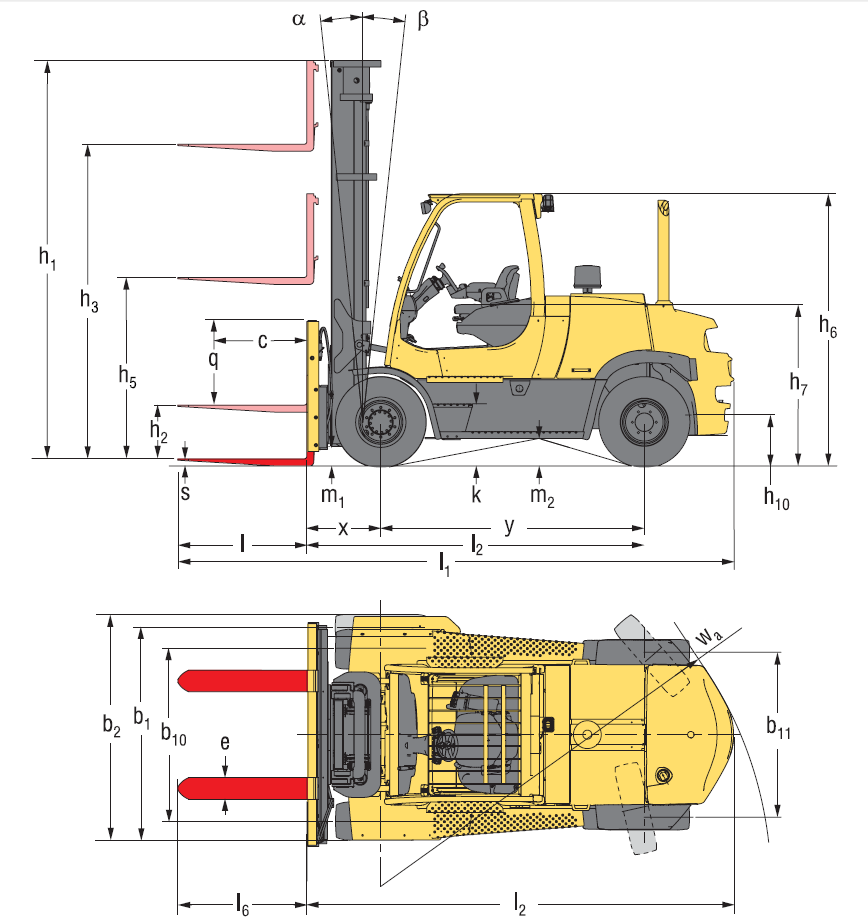
Dimensions (with forklift attachment): length 39 studs / width 15 studs / height 28 studs
Weight (with forklift attachment): 1.006 kg
Suspension: none
Propulsion: FWD, 1 x PF L motor geared 1.4:1
Motors: 1 x PF L motor, 3 x PF M motor, 1 x PF Servo
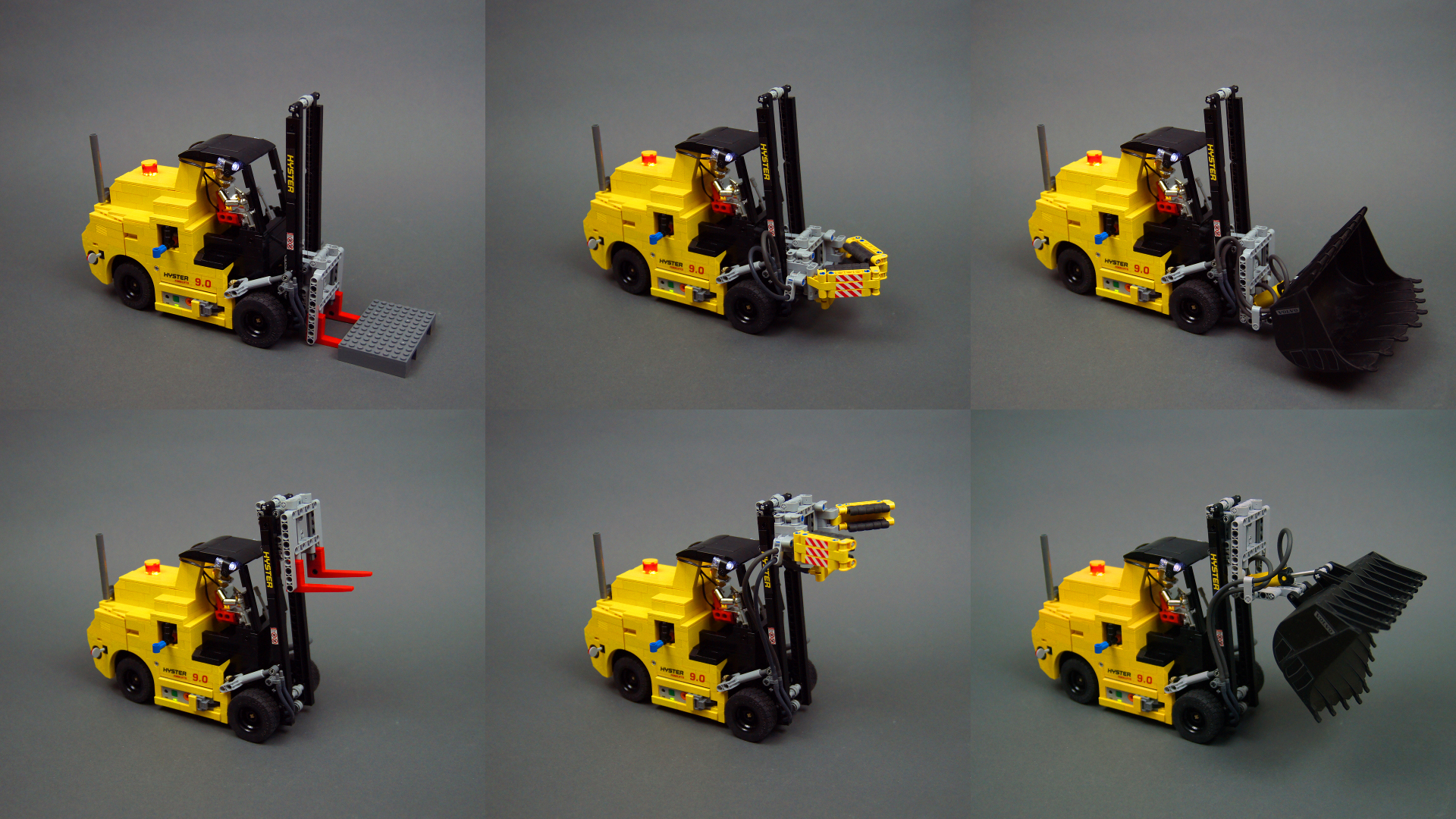
I was visiting a paper mill the other day, and happened upon a truck full of huge paper rolls that was being unloaded by a forklift with a very interesting grabber attachment. The attachment appeared to be hydraulically powered and immediately caught my attention. Having built only a single actual forklift 7 years, earlier, I took the earliest opportunity to build one with interchangeable attachments.
The model was initially going to be a faithful scale model of the Hyster H8.0-9.0FT (such a catchy name!) forklift, but having built a properly scaled chassis and mast I found the body to be dull and boring, and went on to create a very loosely inspired variation of it. The resulting model was effectively somewhat larger than the scale would dictate.
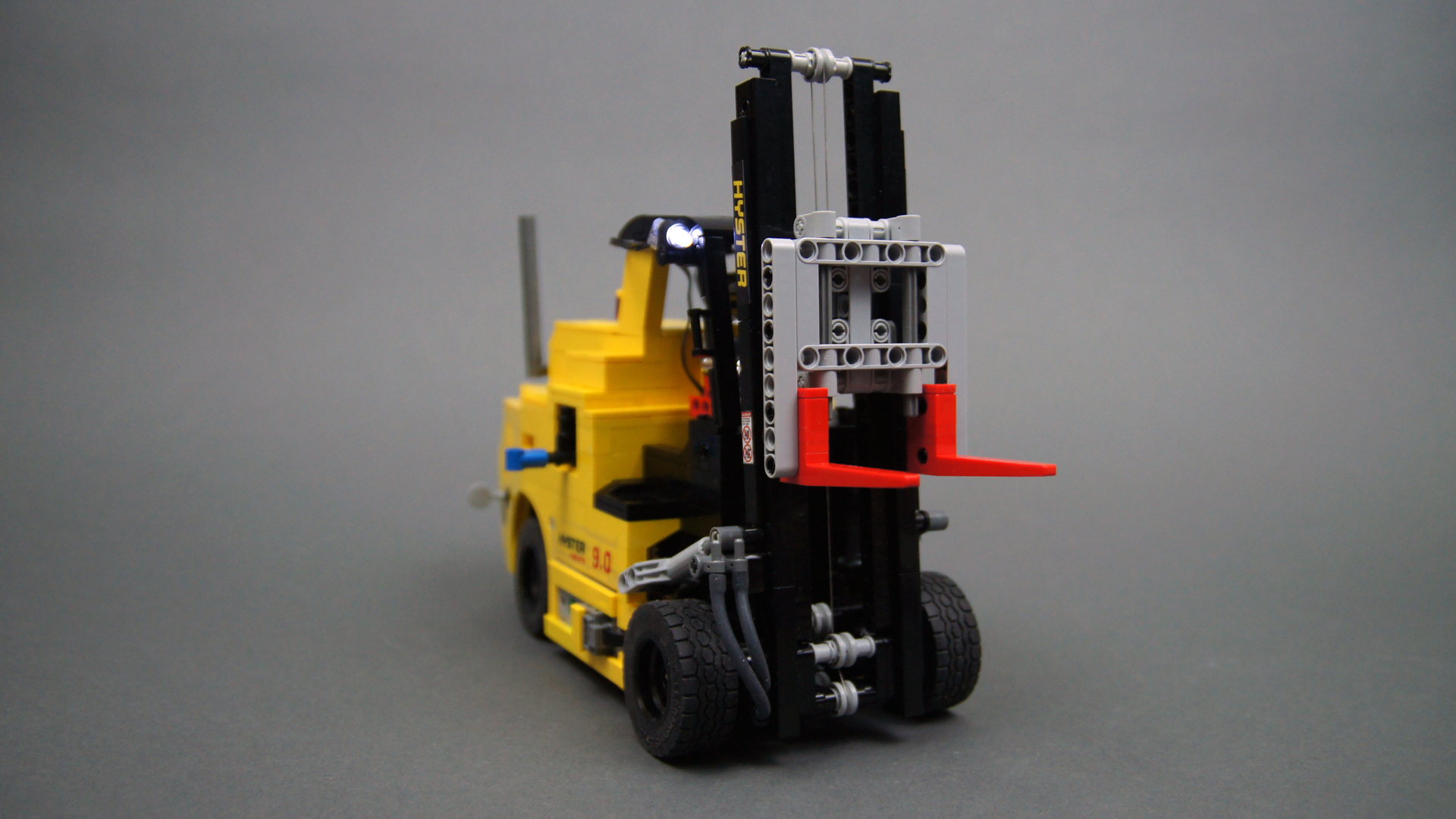
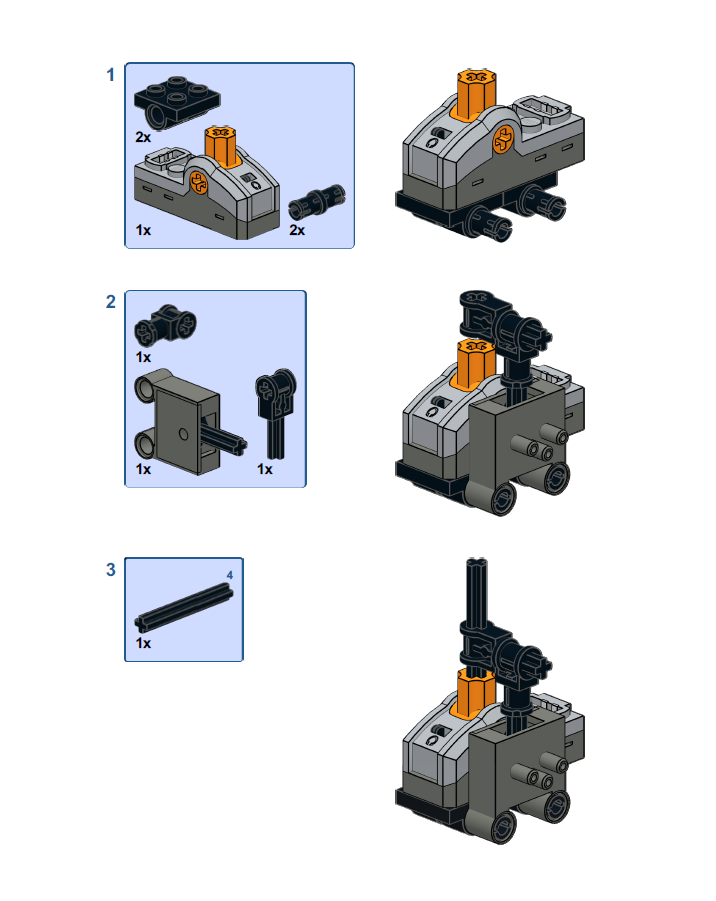
On the technical side, my goal was simply to create a model that acts like a real forklift, by which I meant realistic speeds of various functions, and generally speaking realistic movements. It was meant to be fun to play with, not to set some load capacity records nor to be needlessly complex. The chassis was built around PF L motor used for propulsion, with PF Servo motor controlling rear axle sitting directly above it. A differential was used to drive the front axle which was in fact a portal axle oriented vertically, made so in order to move the wheels away from the differential, thus creating space for mast’s base between them. The mast itself had just single elevated section because this was true to the original machine, and because I already made a more complex mast before. I also wanted to keep the lifting mechanism simple, without adding some massive complex machinery to the mast, so it was done by simply pulling a string by a PF M motor with 8:1 gear reduction. Such reduction ensured a reasonably realistic lifting speed and was still sufficient to handle loads close to 400 grams. Another PF M motor was driving two small linear actuators tilting the mast forward and backward. Both actuators were set wide apart and connected to mast’s sides to make it more stable. The third and final PF M motor was installed at the back and driving a single 6L pneumatic pump, acting as a compressor for pneumatic attachments. Both pump and the motor were connected to a combined switch, that is a PF switch and pneumatic valve coupled together. This allowed to use a single lever to open the pneumatic valve and activate the compressor at the same time.
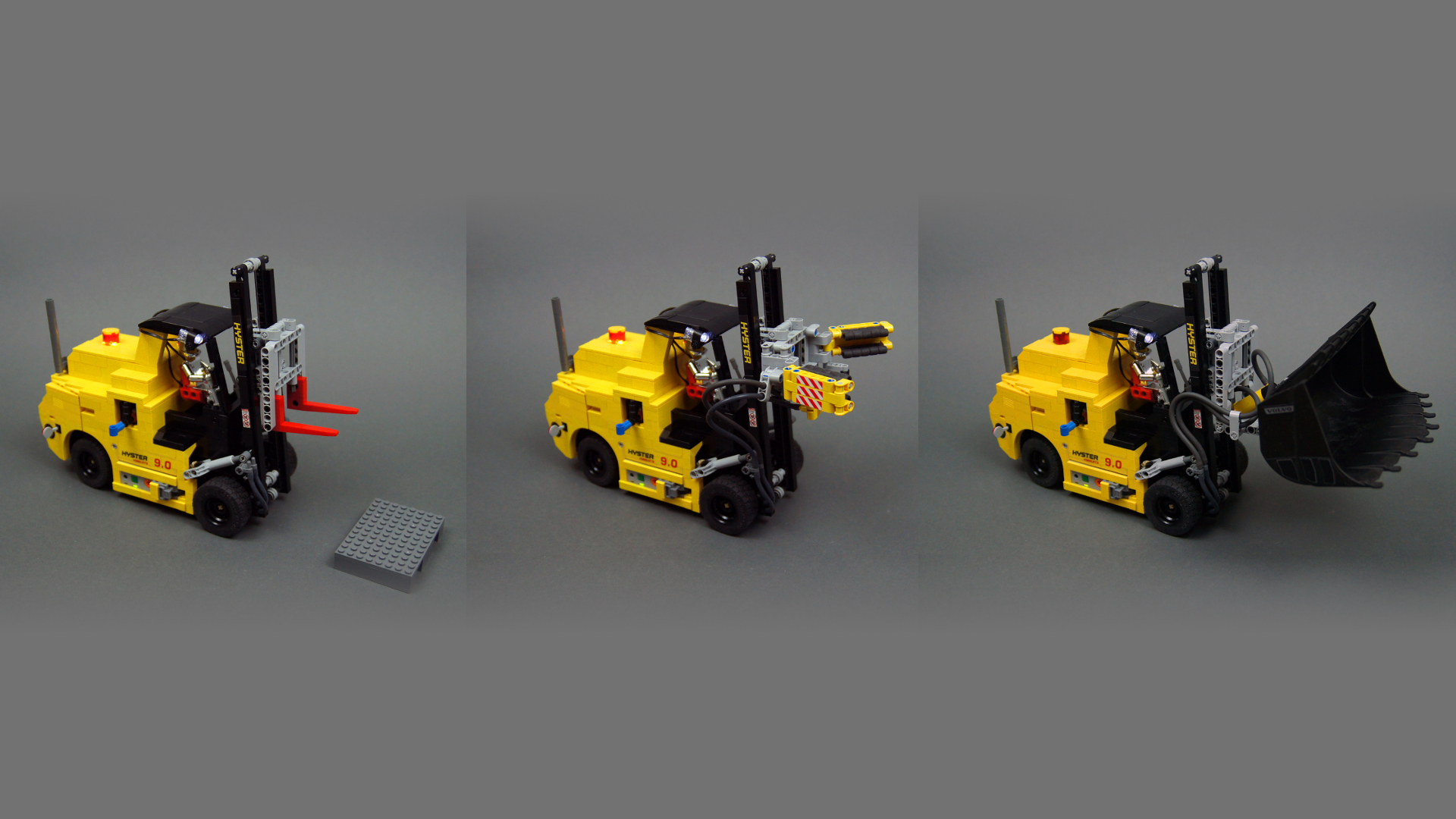
Other than the basic forklift attachment, there was also a grabber attachment and a loading bucket attachment, both powered pnematically. All the three attachments could be swapped in just a few moves, and the pneumatic attachments had to have their hoses connected to outputs at the bottom of the mast. I was at one point tempted to make it so that the forklift could disconnect its attachments itself by lowering them to a certain point, but this would still leave the pneumatic hoses connected and would make handling loads more complicated.
All the primary four functions were controlled remotely using SBrick, which had the great advantage of providing proportional steering. This allowed to slow down when needed, immensely helping to maneuver the forklift. Without the SBrick and with the traditional PF remote control, I might have been forced to gear some functions down to slow them and thus achieve better accuracy. The model was also my first model with stickers made of white foil as well as transparent foil. I was very happy with results, and regretted that it didn’t occur to me earlier to use white foil instead of paper.
All in all, I was pretty happy with the model. It wasn’t particularly good-looking, but it was fairly compact for its number of functions, it worked in a reasonably realistic way and it was simply fun. But it was also simple to the point of being crude, especially in how the lifting was realized.















@BoBe90
In theory that was 23 RPM with 29 N.cm of torque, but this value is taken from motor and gearing, it doesn’t account for friction and motor being stressed.
Could you please tell me how much is the speed and the torque of the lifting mechanism under a load close to 400 g?
I have to design a lego lifting mechanism with a DC motor and a cycloidal drive as a project for my university and this information would help me a lot.
Thank you in advance!
“It can be very useful in difficult situations” XD I laughed my ass off!
Beautiful model! 🙂