Ripsaw XL

Model of a high-performance tracked vehicle. Features complex suspension system and a cannon.
Datasheet:
Completion date: 19/07/2014
Power: electric (RC unit)
Dimensions: length 70 studs / width 33 studs / height 22 studs
Weight: 3.15 kg
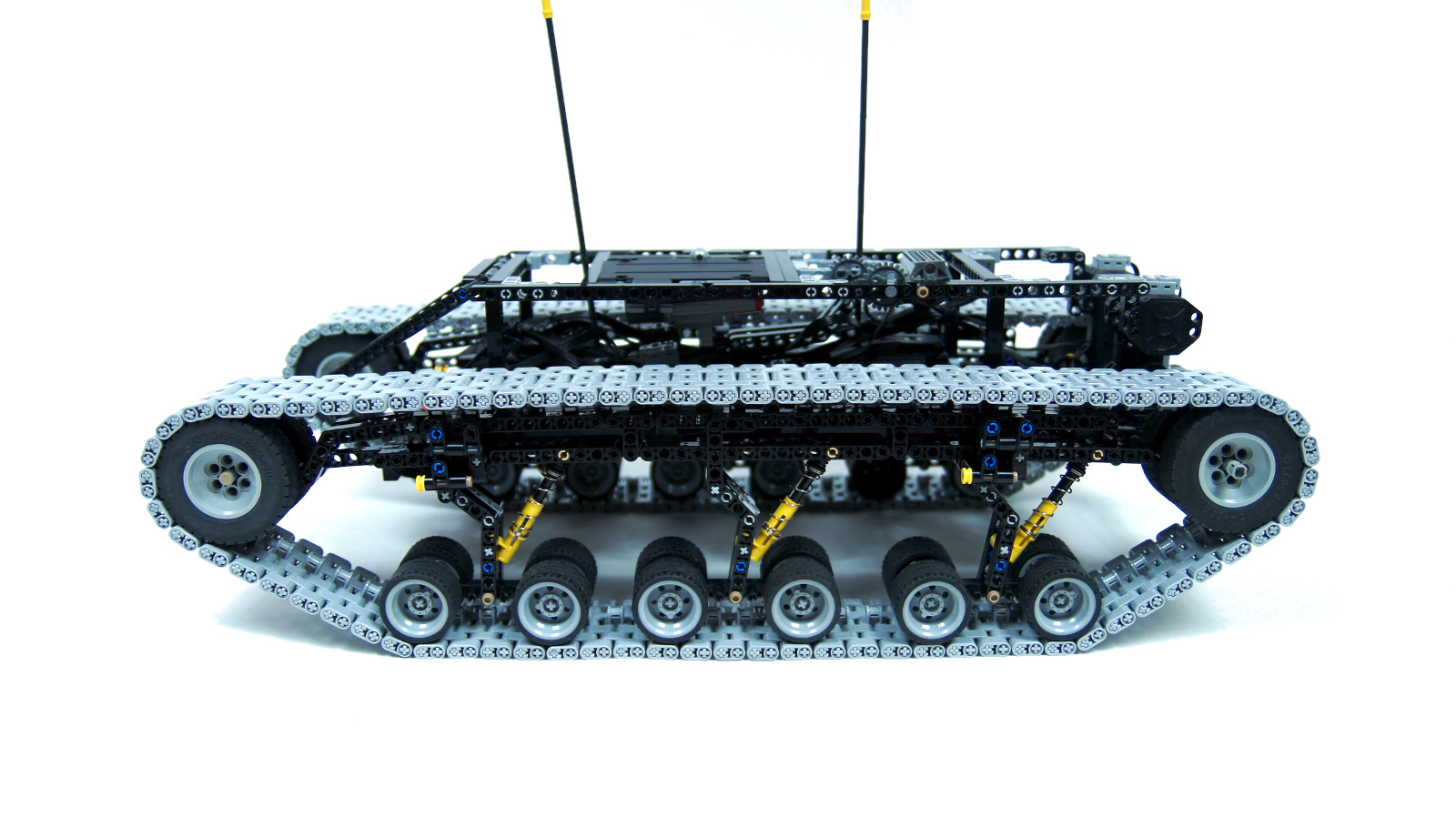
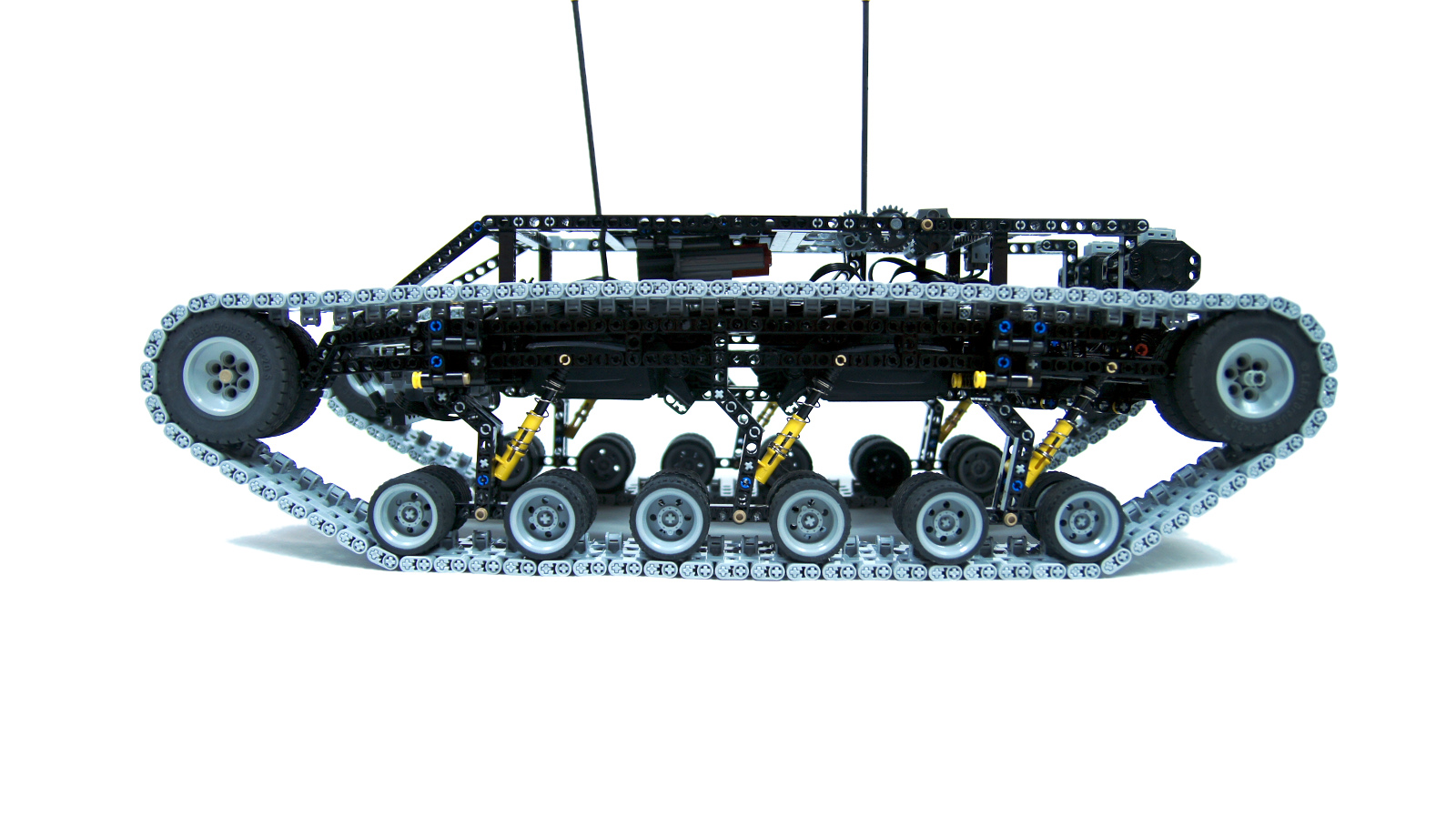
Suspension: pendular bogies on trailing arms with shock absorbers
Propulsion: 4 x RC motor geared 3:1 from slower output
Motors: 4 x RC motor, 1 x PF M motor
With custom-built, heavy-duty tracks tested in my Grassgrinder, and four RC motors available, the next logical step was to build a Ripsaw. I have already built a small one a few months ago, but this time I wanted to make a serious model.
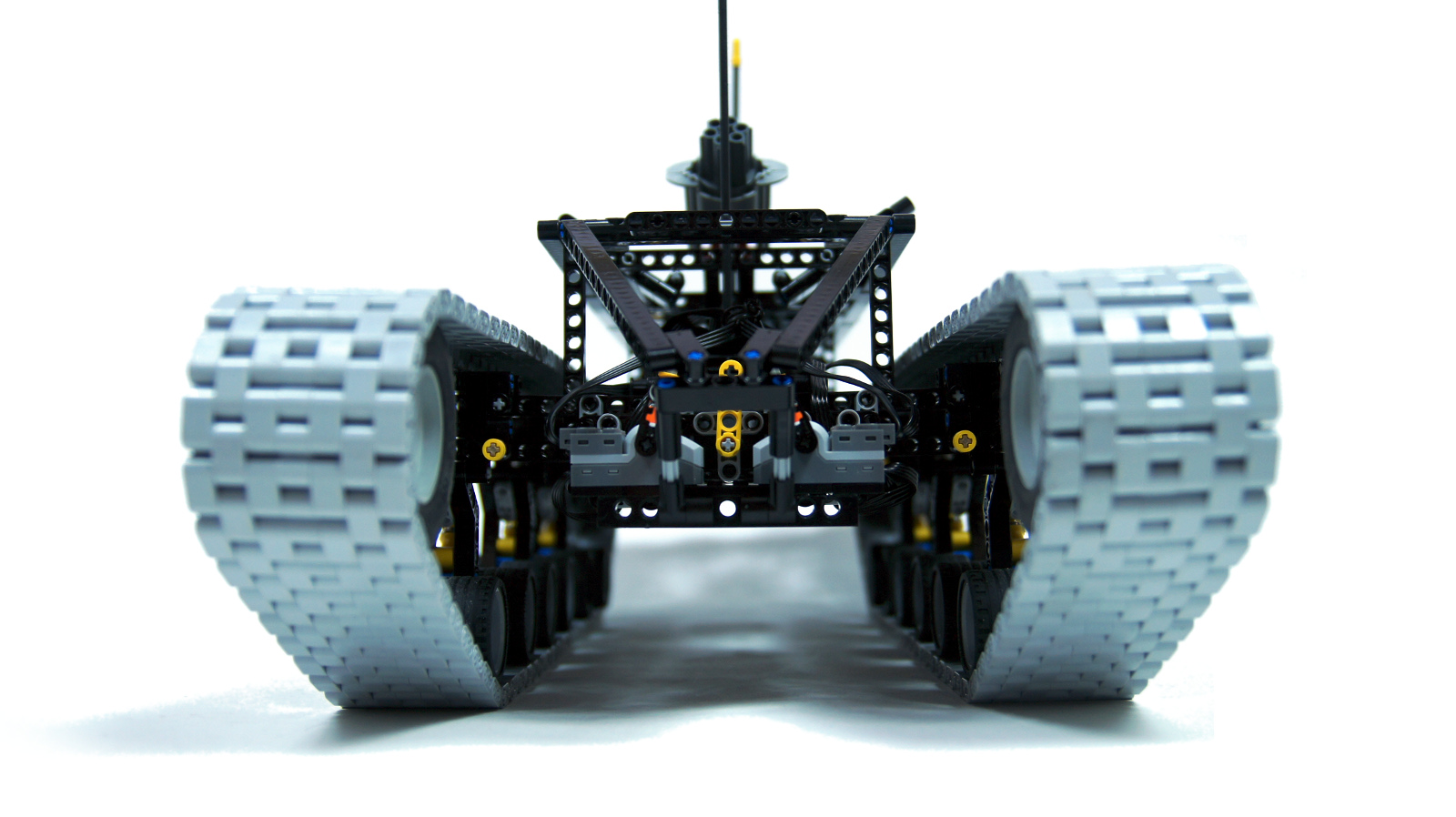
The model was equipped with two 150-studs long tracks, including 900 2L beams total. This means that the weight of tracks alone was close to 1 kg. Suspension system was made as close to the real one as possible, with pendular bogies housing four small road wheels each, suspended on trailing arms with shock absorbers. The resulting suspension was hard, but worked well. It seemed to transfer more vibrations to the hull than was the case with the Grassgrinder, perhaps because of the smaller road wheels and shorter bogies. The real Ripsaw comes with track pre-tensioners in the front sprockets – here, I have mounted the front sprockets on beams that were slightly bent downwards. This was simpler and stronger solution that using shocks absorbers, and it was able to reduce play in the tracks effectively, but to a limited degree.
The propulsion system was the same, with the same gear ratio, just more motors. The front RC unit controlled the steering, engaging four PF switches with its steering output. The rear RC unit controlled a PF M motor with its auxiliary output, which allowed to include one extra function: a cannon popping up from the upper hull.
The performance proved problematic, once again proving that RC motors are simply not fit for vehicles this heavy. I have put brand new Energizer batteries in the model, and all was good and well for about 10 minutes, then the performance started deteriorating quickly. The hot weather was additional issue, as both RC motors and RC units are known to generate plenty of heat, and it didn’t help that their black cases were exposed to strong sunlight. Every now and then one of the RC units would simply shut down from the heat, and I had to let it cool. This raises questions as to whether it’s possible to include a cooling system in such a model, perhaps in form of a ducted fan.
In the end, the performance was pretty satisfactory, but for a shorter period of time. The suspension worked nicely, although it was perhaps a little too hard – then again, a softer suspension would create plenty of play in the tracks. The propulsion system generated much more torque that in the Grassgrinder – it was possible to make zero-degree turns, even in short grass. The conclusion is that the design was correct, but it was crippled by characteristics of the RC equipment, such as the sensitivity to heat and enormous power consumption under strain.






@shan
Building instructions for the track are here: http://sariel.pl/downloads/
can you please tell me the items u use to create the chassis + track ?
@Slung
The video shows that precisely.
How worn out are these track pieces after you used them? Scratches from the pavement or anything?
Wow! 1kg for the tracks ALONE?
I’ve built a whole high-performance car using Mindstorms EV3 (the brick is very heavy) with Ackermann steering geometry weighing only 740g.
Although there was no suspension…
@kevinoufr
It’s not for sale.
hello I’m french and I would like to know the total price? and if it Was possible to have room to reproduce detail, thank you?
Sees, that’s right. I’ll do that, I think.
@EV3fan
Or you can just join a community site like Eurobricks and share your thoughts, ideas and questions with others. It may be much more enjoyable.
@Sariel
Ok, I’ve got a solution. I WON’T let me forbid to say what I think but I will proof what I’m about to say and I will write a warning in front of every comment that contains more than “oh this model is so cool” which says that it may contain something silly and that you don’t have to read it.
@EV3fan
Yeah, again.
Oh. Sorrry. Didn’t know that.
@EV3fan
Everybody knows this idea and you’re like the millionth person to bring this up. Let me sum it up for the millionth time:
– weaker
– much more expensive
– prone to wear down really fast
– the grip of the plastic tracks is already quite good
Mahj’s idea is great for lightweight vehicles, and mainly for indoor driving. So, what I think is: stop commenting. Really.
Hey Sariel,
I’ve found a good custom tracks solution by a pro builder , mahj, on youtube:Trachs out of lego rubber pieces.(It’s this one: http://www.bricklink.com/catalogItem.asp?P=45590)
Here’s the vid:https://www.youtube.com/watch?v=dmR-Y4fp404&list=UU-G_RyVIfGPA7i2aKroleXg#t=36
Now, what do you think. I think the idea is great.
LegoMaster, that thing is so cool!!!
I have been checking your creations the last year and you keep surprising me. You should have seen my reaction when I realized the tracks are made of a million 2L beams haha Lego must be paying you a lot to not make instructions for everybody (joke, or not?).
I know you want to teach us how to fish instead of just giving the fish (I got your book) but I am suffering when I see your creations. I probably got every part or just buy it but a masterpiece instruction from you would be so fantastic, like one of your supercars (Zonda) or that 2K tank. First let a lot of people pay in advance for the instruction and win win. I know you don’t make full instruction but I can’t resist begging for it… please??? Best argument: “Come on… come on…”
Btw, my cats like your hamster!
@TShera
Depends on the wheels, but from my experiences with L motors, I would expect you’ll need to gear it down at least 3:1.
@Sariel
What gears would be best for high speed, inside that portal axle part, if propelling with an XL motor per axle?
@TShera
I guess you could try… or you could buy the four pieces you need, whose prices start under $1 per piece: http://www.bricklink.com/search.asp?itemID=102719&colorID=86
@Sariel
Is there any way I could do it using common pieces only? I own 24008, 24009, and 9395.
@TShera
Well, the easiest way would be to replace the standard wheel hubs with the portal ones from the 8110 set.
Sariel,
How could I add portal axles to an RC 42029 set? I want more ground clearance.
Thanks.
@Grant
Um, I make the rear axle just as wide?
How do you get wheel’s on a car the same distance apart in the front and back? The front axle tends to be wider on my cars due to the steering system.
@elton
Thank you, but I think I’ll pass.
hey sariel I like your model very much and anyways could you please give me your home address cause I would like to meet you in Poland and anyway I am a am a great fan of u and it would be my honor to meet you thanks.
@Kaszi
http://www.bricklink.com/catalogItem.asp?P=60483
@Sariel
I have never heard about it before. I wasn’t able to find the technic 2×1 beam. What is its name on Bricklink?
Thanks.
@Kaszi
Are you aware of the Bricklink?
On lego.com the 2m beam costs $0,40, so the two tracks cost $720,00. Can i buy it cheaper somewhere?
Is this modell available in your book?
@Iaz
I’m sure both have been done before. I’ll pass.
Hi, I don’t know how to reach you so I thought this maybe the best way.
Sorry but this has nothing to do with this, but I am wondering if maybe you could
Make something different like a lego Swiss Army knife or a lego computer?
Just a thought ☻ thanks.
General Joe Colton’s Ripsaw?
@Sariel
You could always try Ultrafire/Trustfire batteries which run at about 4V per battery. These would be great for heavier models, although they may just burn out the motors. Either way, they could be a great improvement to an already amazing model!
Nice!
Please build the Ghe-o-rescue!!
@Tobias Stanisfugl
There’s not much to tell. Two RC motors for each track, geared down 3:1.
Hi Sariel
What a huge warship! Since the Grassgrinder’s suspension layout was no issue for an sprocket free drive, with Ripsaw’s topology a really soft and long excursion one poses the question of adhesion then. So I see a bit of a dicrepancy from concept; of course, the chain tensioning mechanism is a major topic designing an high performance cross country tracked vehicle.
Can you tell or show little more of the drive train in detail?
Greets, Tobisas Stanisfugl
If you are willing to pay for separate postage fees, you can order the charger from their international warehouse (the batteries must be ordered from europe, or the postage fees will be ridiculous). You can also use a NiMh charger if it’s charging voltage can be set at 1.9 volts, though most don’t have this option. Of course you can also try your luck on ebay or local shops, but I bet the prices will be much higher.
@Mikko
Yeah, but I don’t have a suitable charger either.
Sariel, if you are interested in higher voltage, maybe you should try 1.6 volt NiZn-batteries. They are really cheap on hobbyking, little over 1€ for 1500mAh AA cell. I haven’t tried them myself yet, because I don’t have a suitable charger for them (a standard charger for 1.2 volt NiCd/NiMh cells obviously won’t do), and hobbyking doesn’t have them in their eu-warehouse at the moment.
Cool! Its so much like mk1, yet so much better, well done, I really love it, it looks so great! Keep up the awesome work! 😉
Thx for the link 🙂
@Yeti
Thanks, but I’m not comfortable as a judge of other people 🙂
@Pedro
Here: http://www.bricklink.com/catalogItem.asp?P=57523
@Sariel
OK :p can’t find it on brickstore, thats something I could use for a A-10 thunderbolt (thats one of my projects)
I thought of a rim you modded 🙂
You inspired me to make my own technic vehicle i took the 1/10 scale ferrari f1 car and made a 1960’s f1 car is there any way i could send you some pics of it for criticism? If not thats ok. Keep doing what you enjoy.
@Pedro
Of course it’s a LEGO part.
hi, nice work and cool video to go with.
just wondering if the 6 barrels canon is a lego part or a DIY part you made.
Nice song pick!
I hope you decide to build more anti-pet stuff on the chassis. Very neat to see.
LEGO should release an official ‘super battery’ just for your creations. …That and sponsor some of your batteries and bricks. Your work is solid!
@Joexer
No problem, thanks for advice. I’m using really nice Eneloop batteries normally, but I wanted 9V here, not 7.4V.
Nice work, those treads look great. Water cooling (per your design from your first book) has been more effective for me and my friends out here in California. One of our guys just took out the temp. control circuit altogether. It gets to 110°F (44°C) out here regularly, but its dry. I use a PC fan as going all Lego is extremely hard. Pc fan lowers ambient temps by 5°(2.4°C). And pneumatic(IV) tubes with water wrapped arround gives a solid 15°F (~9°C) But whatever floats your boat (when you are not in a major drought). By the way, if you don’t mind using non proprietary Lego stuff, I suggest batteries meant for rc cars, IE Hobbyking.eu, Typical Alkaline AA’s provide the standard 2500mAh but you can get a 2500mah battery with better amp draw, rechargeable, efficiency and burst/constant drain performance for like $8 usd (5.92 Euros) mine has lasted 4 years and I got a solid 3 hrs plus constantly from my(disassembled) nxt based crawler. Just a few ideas. Hope I can help a little :). Also sorry for the text wall.
Love the cannon.