Dakar Truck

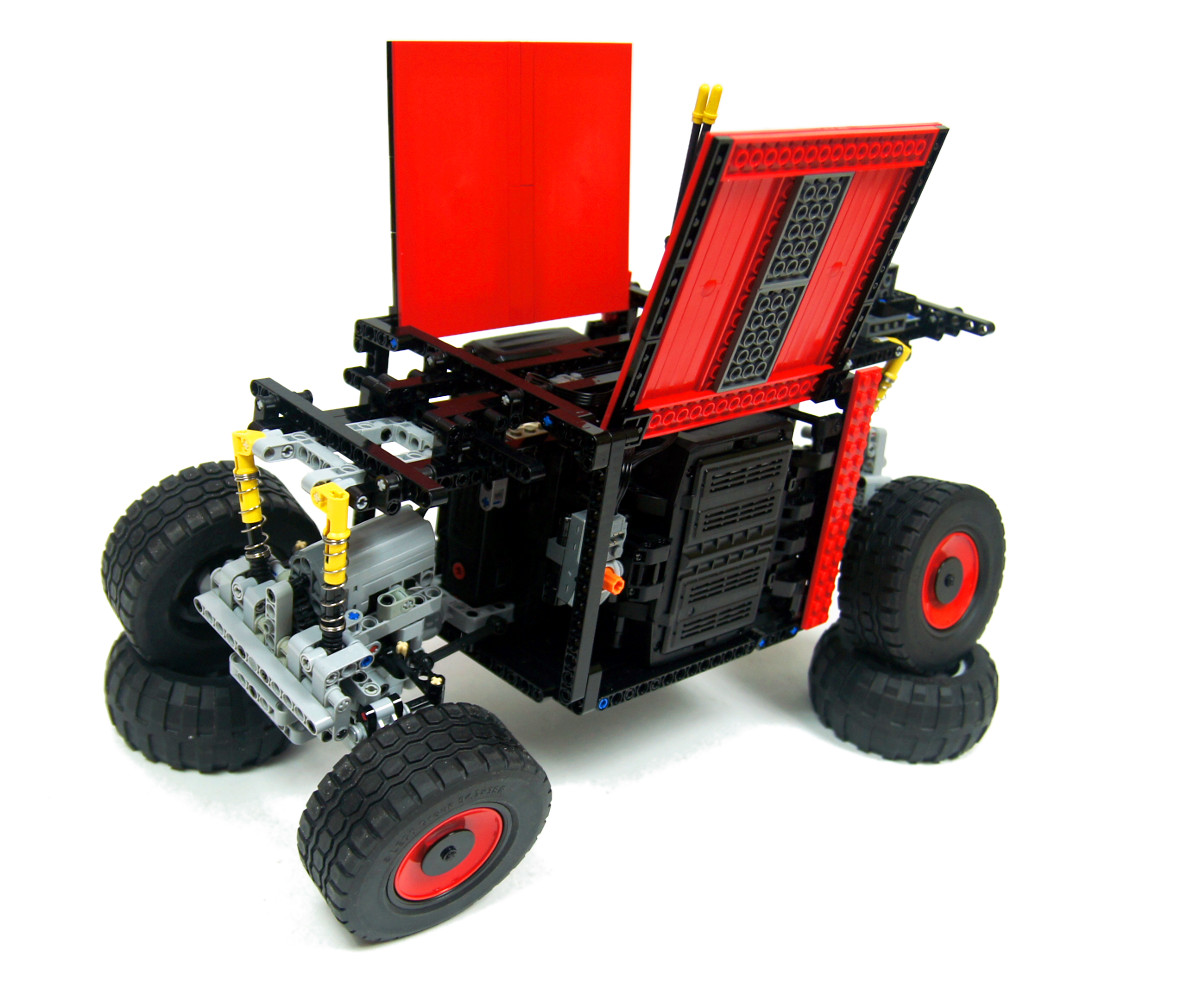
Model of a Dakar race truck inspired by MAN TGA. Features full suspension, 4×4 drive, remotely locked rear differential, lights and custom stickers.
Datasheet:
Completion date: 19/10/2013
Power: electric (RC unit / 8878 battery)
Dimensions: length 60 studs / width 26 studs / height 34 studs (not including antennae)
Weight: 3.412 kg
Suspension: live axles
Propulsion: 4 x RC motor geared 4.2:1
Motors: 4 x RC motor, 1 x PF Servo motor, 1 x PF Medium motor
I have long wanted to build a large, fast Dakar-styled truck, and I hoped a propulsion system of 4 RC motors would do the trick. I was wrong.
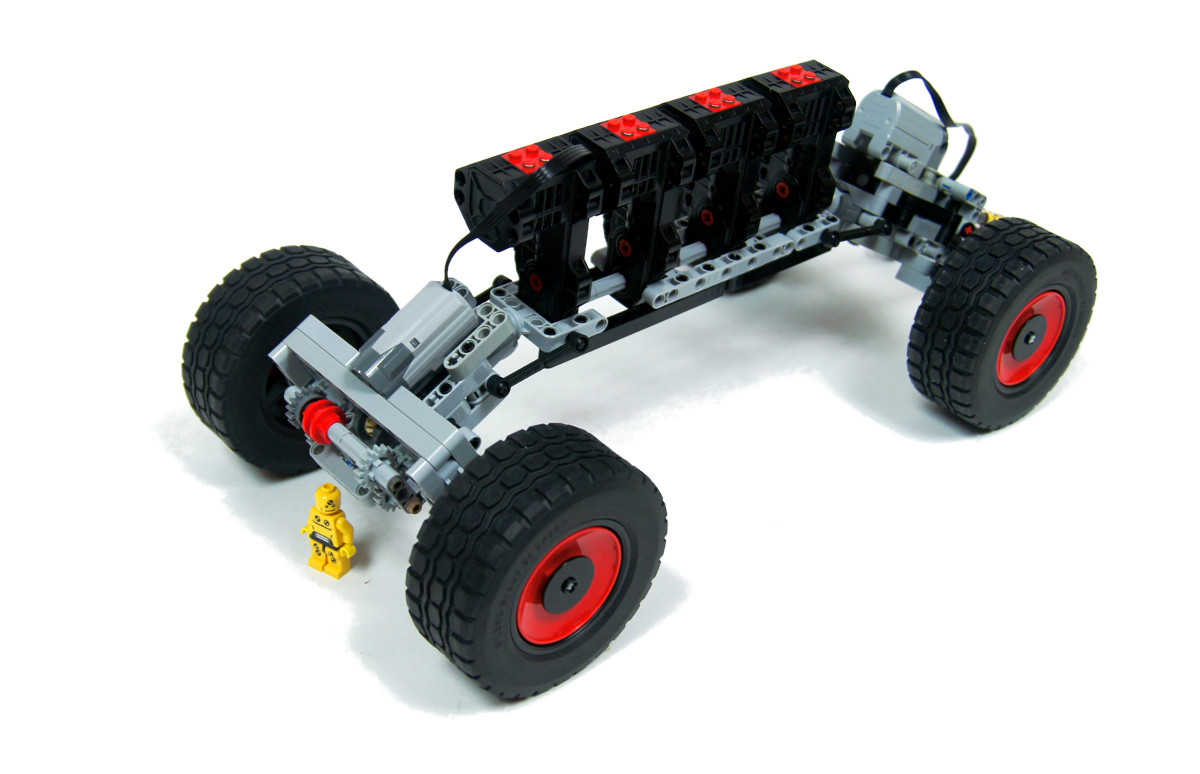
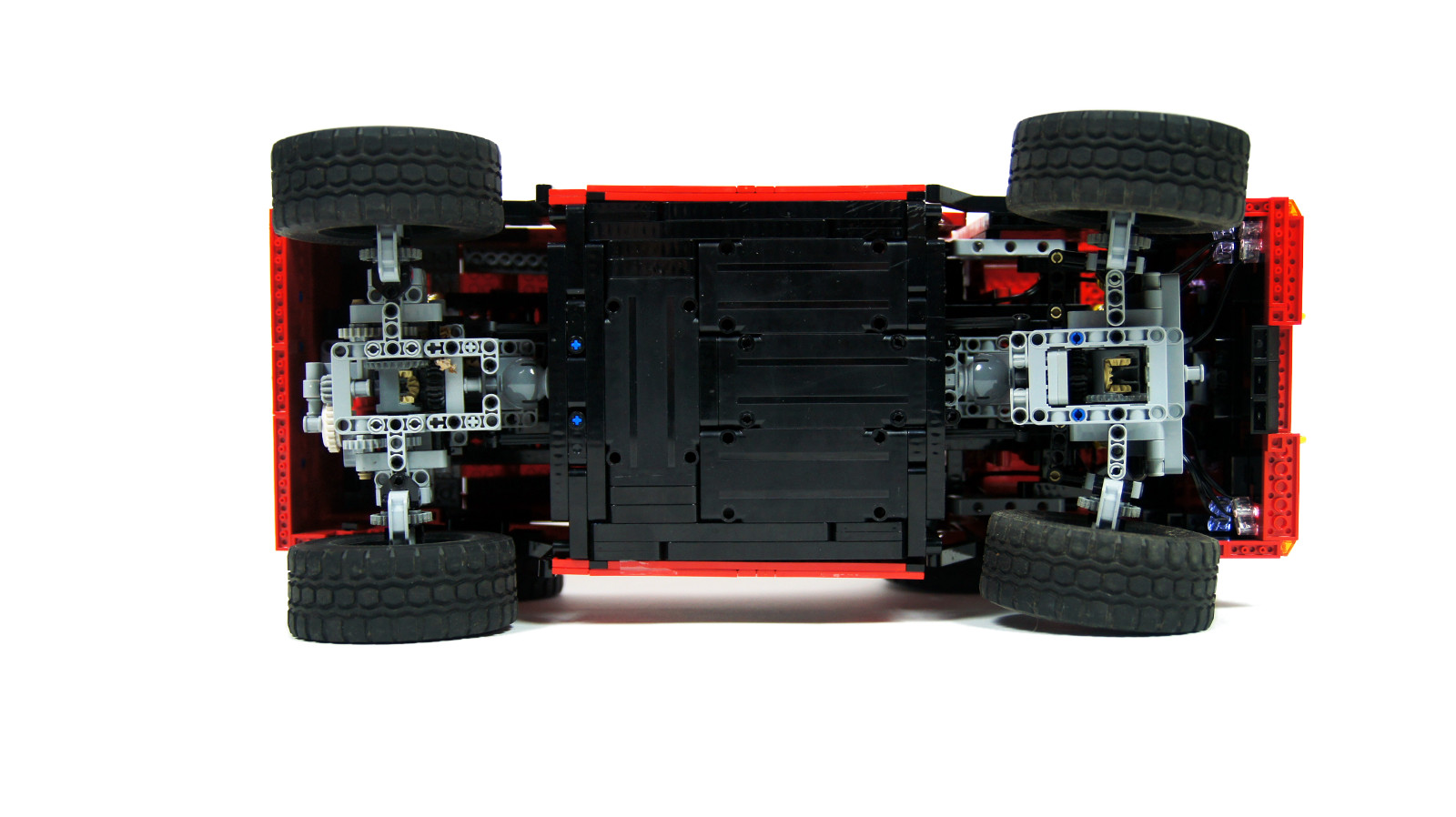
The model was quite closely based on a MAN TGA racing truck. I have been looking for a way to fit 4 RC motors and 2 RC units into a small space with a good access to both RC units, and I got an idea around which this truck was built. The chassis was literally built around 4 RC motors lined up in a row, with the driveshaft going through all of them. By being connected to each other, the motors formed a very rigid structure which replaced a typical frame as a mounting point for the rest of the chassis. The two RC units were placed on their sides, with antennas facing inwards and bent at right angle to come out on top. Such orientation guaranteed easy access to the bottoms of the RC units from the sides of the trucks, and the antennas, being metal, were not damaged from bending. The bottom of the chassis was fully protected by a cover that was acting as a dust shield, as well as lowering the truck’s center of gravity a little.
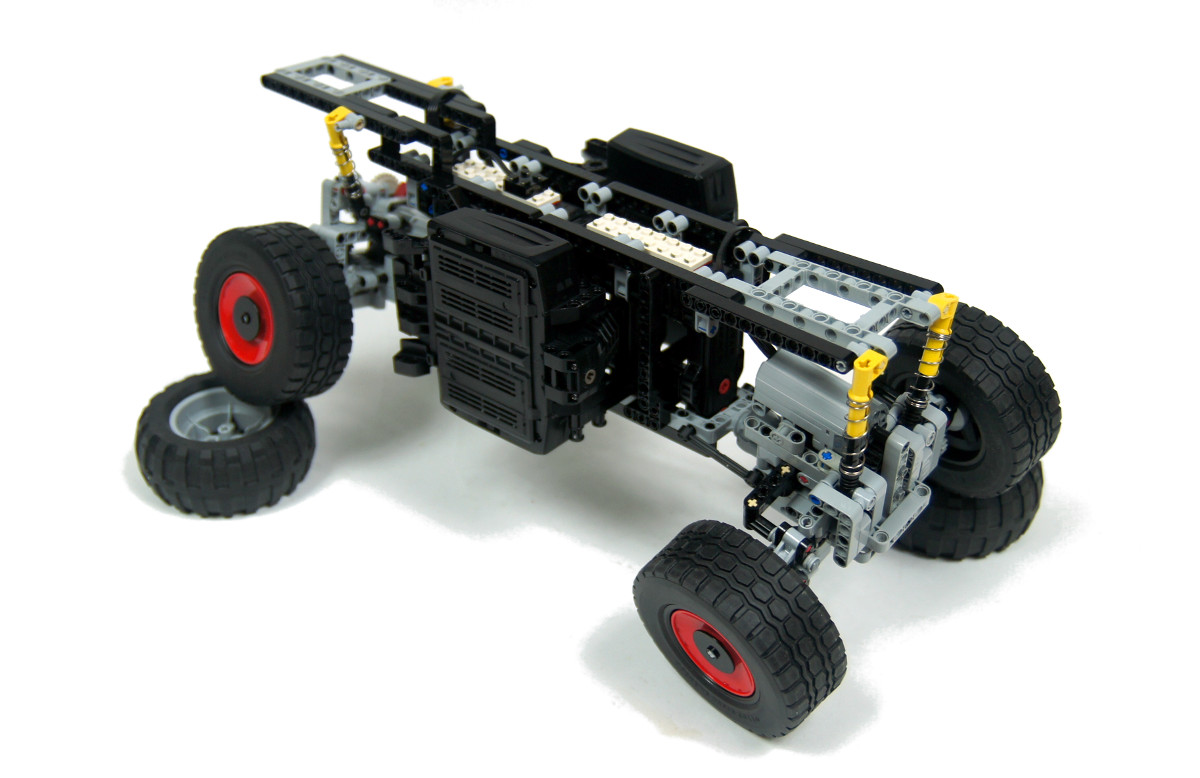
The suspension consisted of two live axles, each connected to the chassis by a ball joint, and stabilized by long hard shock absorbers – two in the rear axle, four in the front. The front axle also included a PF Servo motor controlling the steering, which was connected to a PF switch. The switch, in turn, was sitting on an axle coming out of the steering output of one of the RC units – they both turned out to have a very similar range of movement. The switch was connected to a 8878 rechargeable battery installed over the rear axle, which was also the source of power for the lights. The rear axle was simpler, with a PF Medium motor installed in it, connected to the auxiliary output of one of the RC units, and controlling the differential lock integrated into the axle.
The building instruction for the live axle with a differential lock is available here.
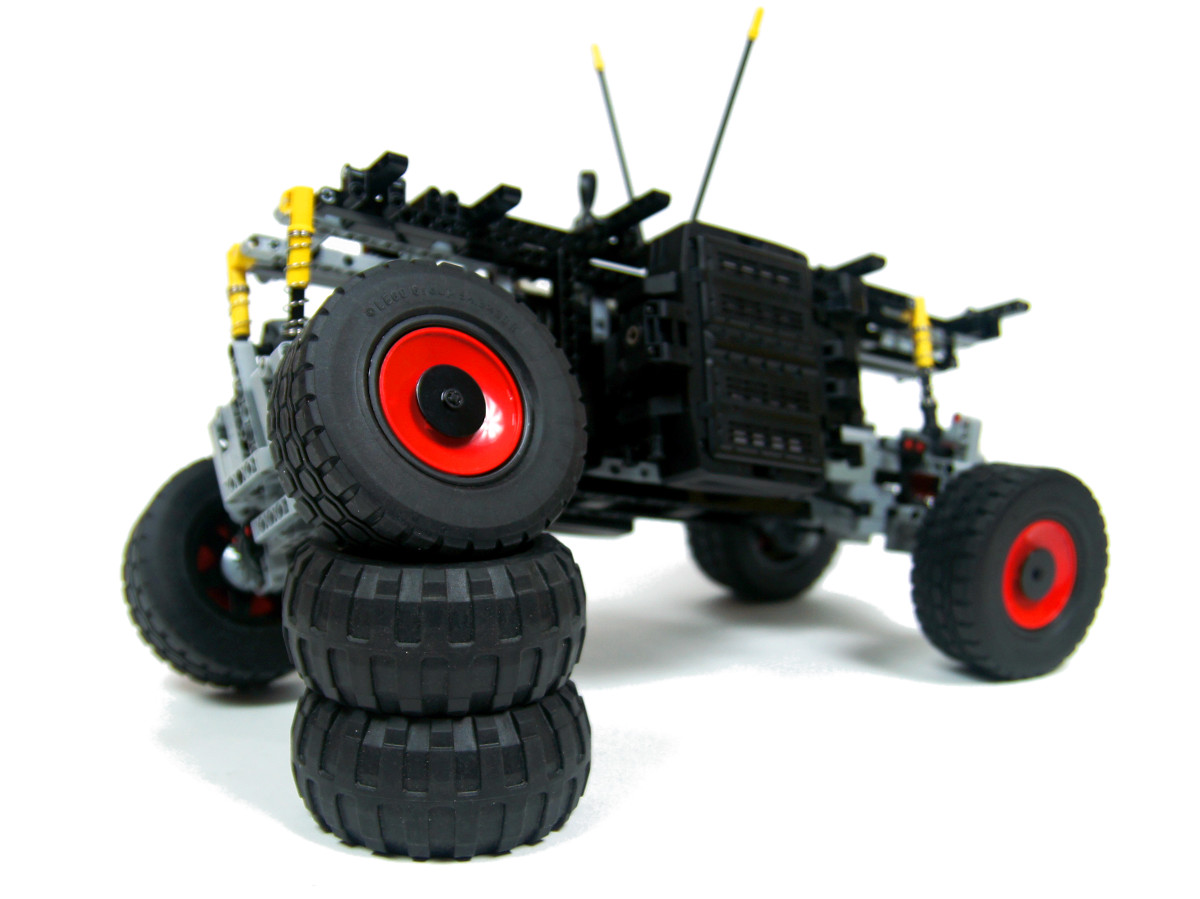
The truck looked reasonably good and was very stable for its height. The propulsion system, however, struggled, because I have made the classic mistake of putting too much weight at the given gear reduction. At final weight, the truck would go quite fast for 5 to 10 minutes after inserting fresh batteries. Then it would get sluggish, and the RC units would start cutting power from the motors because of the high load on them. Another gear reduction stage could have helped the problem, but it would require a heavy modification to the whole chassis and moving the motors higher inside it. But the essential problem was the weight of the model, which reduced in a significant wear on the axles inside wheels and differentials. This could be probably remedied by greasing, which I don’t do on a principle. The steering lock was poor, too.
In the end, the model looked much better than it performed. I’m sure that using four PF XL motors and relying on the PF system instead would result in a lighter model with much better off-road capabilities. The RC motors are simply not fit for high-load applications, they become extremely power-hungry when handling heavy loads, and ignoring this was what made this model a failure.


























@Pawel
I didn’t make red rims. I put red dishes in black rims: http://alpha.bricklink.com/pages/clone/catalogitem.page?P=44375a#T=C
hi Pawel,
gr8 truck!
one Q, how did you make these red rims, i’d need same for my Xerion tractor, but cannot figure out a part i can use or…shall i paint it? would it still be kosher 🙂 for technic fans?
thx
@Sariel
Thanks
@Artwodeetwo
I think you could start by looking at Ingmar’s trucks: http://www.mocpages.com/home.php/34273
Some of them have advanced suspension systems with 2 axles in the back, suspended on links and rubber connectors. Some of them come with instructions, too. I think you’ll find good inspiration there.
Sorry, one other thing I should mention is I want good off-road ability so ground clearance is essential.
Hi Sariel, I want to build a Land Rover Defender 6×6 with ball joint for the front and rear axles, but I don’t know the best way to connect the third axle. Would it be best to connect it to the second with a small turntable, or with linkages and drive from the chassis above the axle. What would you advise? Thanks
@Old Man Jenkins
From this: http://www.brickshelf.com/gallery/Sariel/DakarTruck/inspiration1.jpg
So how did you scale it? As described in your first book.
@Old Man Jenkins
I don’t know. If you find any, let me know.
Where are the blueprints?
Fantastico!
I find a good thing for a exellente torque with old differential and Z 20 gear wheel and angular wheel (sorry for my english) 🙂
and for lookable differentiel I use differential gear casing and it’s work good 🙂
@PPiotr
Z naprawdę prostych do polecam ten, nie do zajechania: http://sariel.pl/2011/02/2-speed-heavy-duty-linear-gearbox/
Cześć. jestem w procesie tworzenia prostej terenówki z lego i małe pytanie znasz może jakiś prosty design skrzyni biegów z typu sequential gearbox? zapomniałem jak to na polski będzie.
@Vojta
Nope.
Hi, Sariel
do you have instructions for the front axle?
Thanks
@Jack Evans
Here, that’s the beast: http://www.amazon.com/Titanium-Battery-100-240V-Adapters-MD-1600L/dp/B005UNPM3M/ref=sr_1_11?s=electronics&ie=UTF8&tag=slrlounge01-20
Where did you get that battery charger from?!!!!! i really need a battery charger like that!
@Marcel1980
Just regular paper, nothing special.
The stickers really finish it. Very cool model.
Small question, what paper/stickersheets do you use for your stickers?
@gabry
Because it’s not good enough.
Why didn’t you put instructions for the front axle too? ;( From the pictures I find it very interesting…
that’s a nice truck
Nice truck!! Too bad about the motors and the weight though…maybe you should have done it smaller?
You should do an American pickup for a project…say a 1978 ford?
A-Awesomenessssss ;D The bodywork is very impressive, wow….
Don’t be too disappointed in your run time. The real R/C vehicles I drive also only last 5-10 minutes on a charge. That’s pretty normal. My big 1/8 scale truck pulls over 100 amps and requires 5 Amp-hour batteries at 24 volts, and still only lasts 8 minutes. Considering your power supply, the performance and run time are actually quite impressive.
@Max Butvinik
No, there was no damage, only the axles nearest the wheels got worn.
@David
I don’t want to revamp it, I’d rather try another vehicle with 4 PF XL motors in the future. A Land Rover, perhaps.
Just wondering if you were considering a slight revamp using the PF XL motors, or just moving on to the next project? Either way keep up the good work. I love checking out your creations, and your tutorials and small instructions are of tremendous help. Your book has been very insightful as well.
Finally!!!awesome dude.
Did your differential/20t gears get damaged? Because I currently have a similar 4 buggy motor chassis built as well-more focused on stability and performance when climbing-but my 12t gear keeps slipping against a 36t in a 5×7 frame despite the reinforcements. Of course this only happens when, say, front end climbing up a wall or up a steep angle. If I link pictures will you be willing to help me with my problem?