Octopod

My first walking vehicle. Features 8 legs driven by two separate motors, with ability to steer and turn in place.
Datasheet:
Completion date: 05/12/2010
Power: electric (Power Functions)
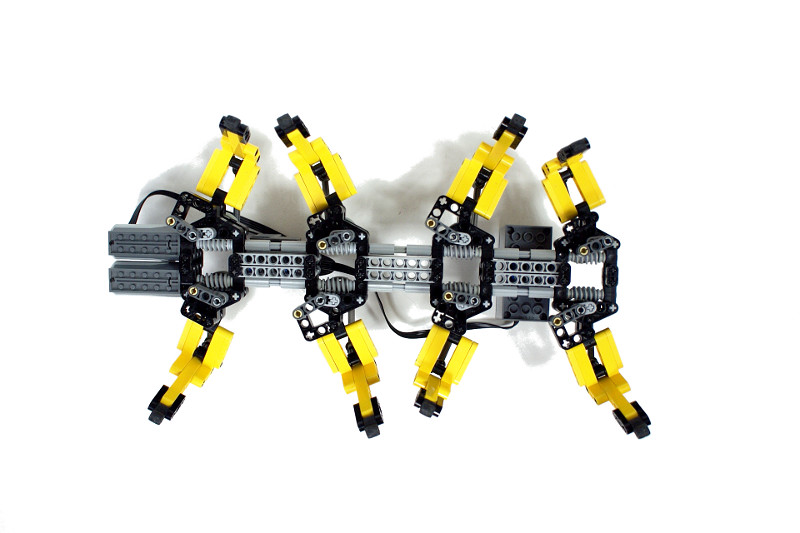
Dimensions: length 41 studs / width 28 studs (with legs spread) / height 14 studs
Weight: 0.421 kg
Suspension: none
Propulsion: 2 x PF Medium motor geared 8:1
Top speed: 0.22 kmph
Motors: 2 x PF Medium
I had an interest in walkers for quite a while, viewing them as a new, challenging and unusual type of vehicles. The work on this particular walker was completed over a single evening, and started by an attempt to model the range of movements of a spider’s leg. It took me several hours and many leg versions to get it right, but it was fairly easy from then on.
This is my first walker ever and I had no previous experiences with walkers whatsoever, which is why I wanted to make is as simple as possible, and reasonably small. I also wanted it to steer, and I have considered two possible solutions to achieve that: by using pair of legs that are articulated and can be set at angle to each other, or by driving left and right legs by separate motors. Since building the articulated body for the walker seemed to hold a significant level of complexity, I chose the latter solution. It had, however, a single drawback that made me give up the initial 6-legged version of the walker and try an 8-legged one. The reason was: legs’ synchronization.
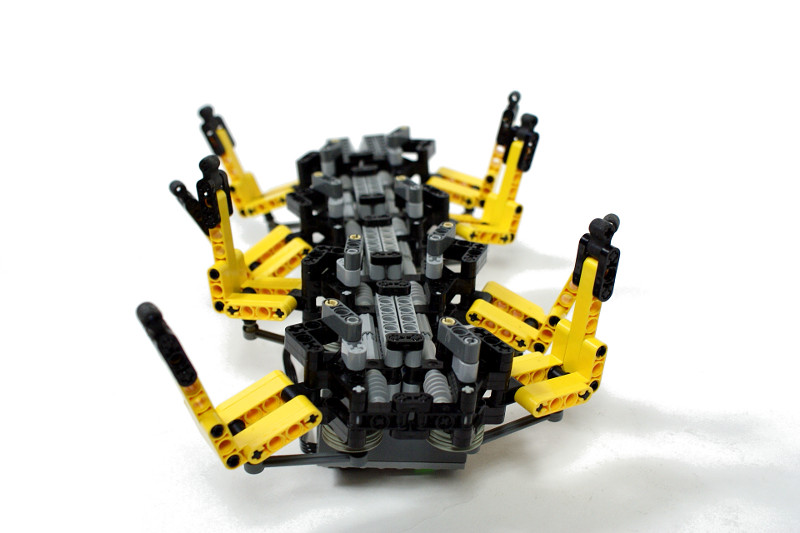
To keep a 6-legged walker stable, legs must stay synchronized – meaning that left and right legs must touch the ground simultaneously. Thus the vehicle has three points of support at all times (e.g. two left and one right leg), which – given proper weight distribution – is perfectly sufficient. However, driving left and right legs separately means there is no mechanical connection between them, which makes it impossible to keep them synchronized – sooner or later they will become desynchronized while turning. This is a trade-off that this solution comes with, offering accurate steering and ability to turn in place. I’ve spent some time testing a 6-legged walker, but it wasn’t stable enough because of the desynchronized legs, and it would often fall forward or backward while turning. Luckily, the modular construction of the body made it easy to add fourth pair of legs, and with 8 legs altogether, the walker proved much more stable. Still, a walker with constantly synchronized legs and with steering done by articulating the body would probably show superior stability.
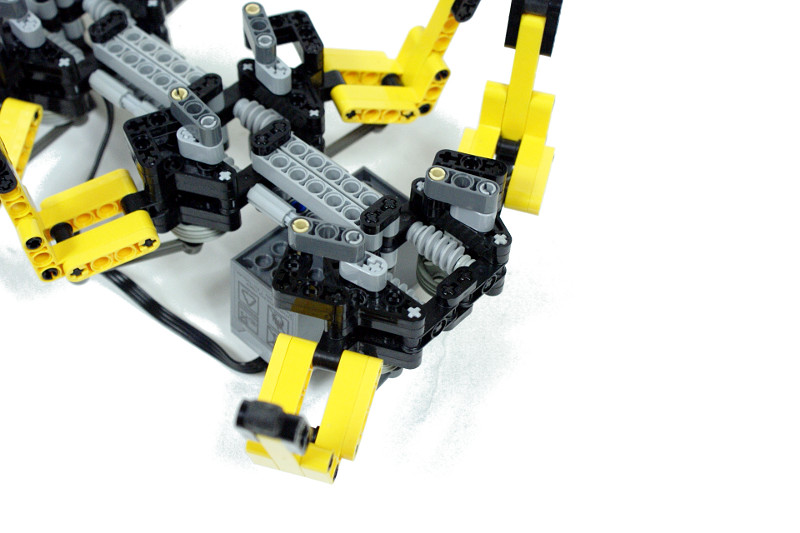
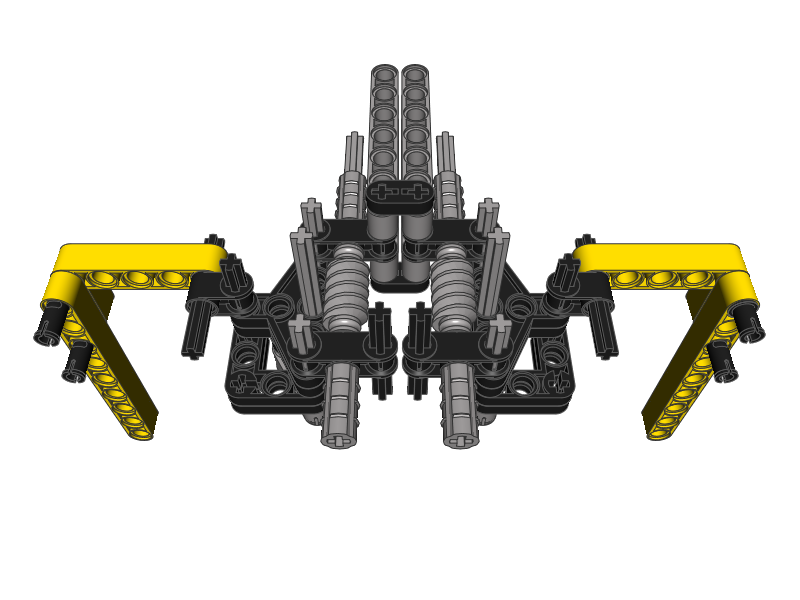
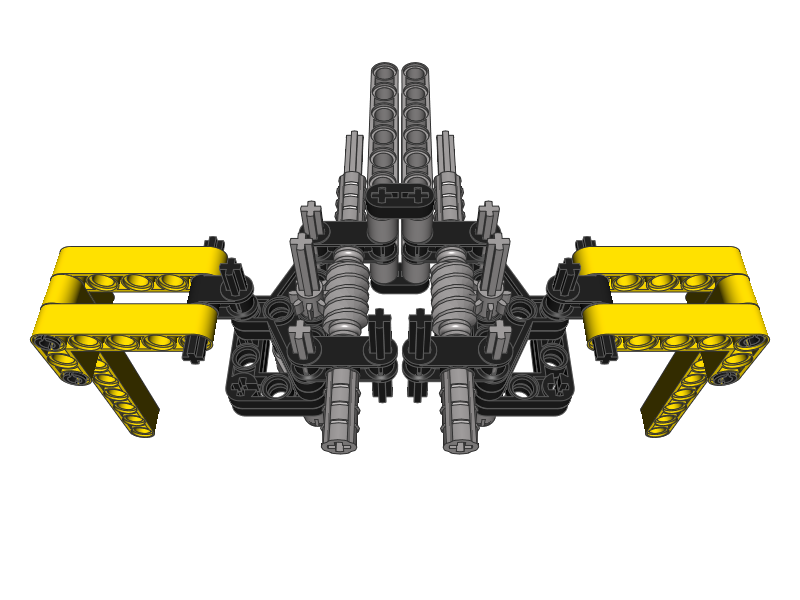
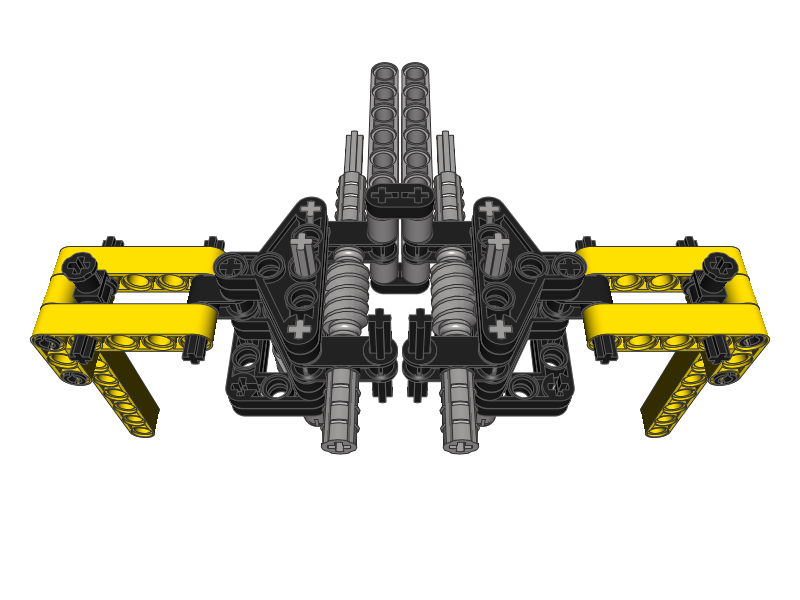
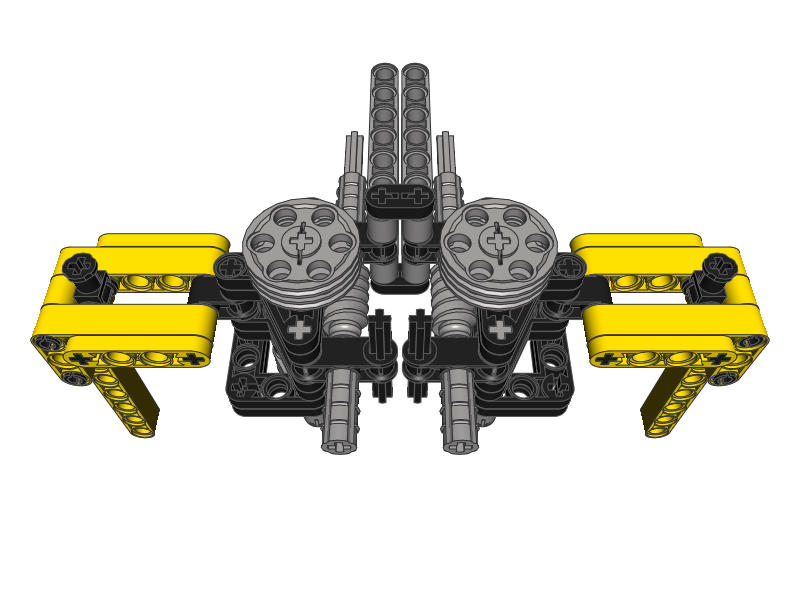
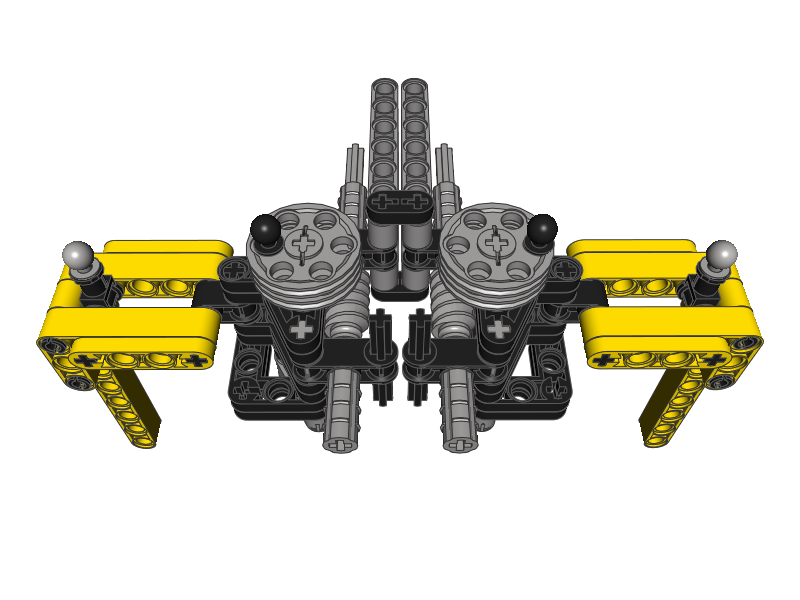
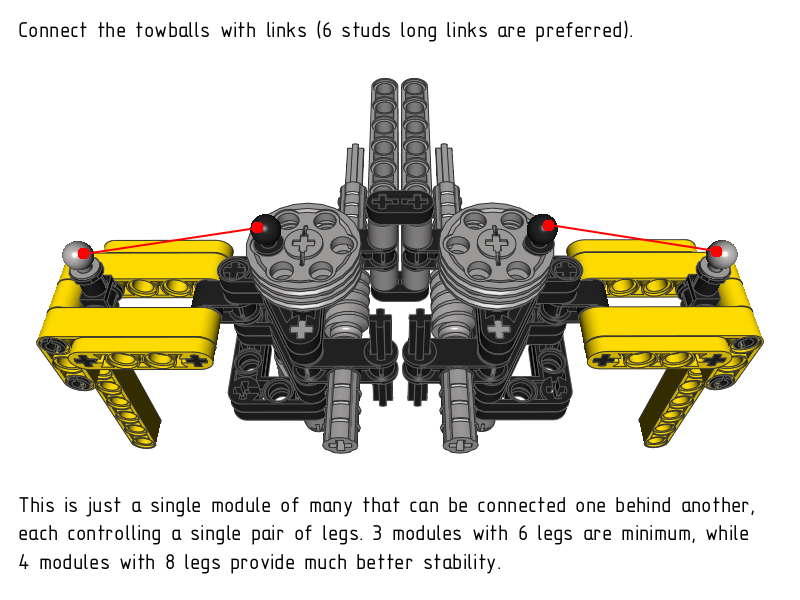
Each leg has two ranges of movement, both executed as arches: forward/backward and up/down. The first movement is realized by an eccentric mechanism rotating the vertical axle with the leg mounted on it. The latter movement is realized by a link between two towballs: one on the leg (in what we could call a knee area) and another one atop a double wedge belt wheel that rotates acting as another eccentric mechanism. The main advantage of this solution is that I was able to drive both movements by a single vertical axle, driven through a worm gear by a longitudinal driveshaft in the body, thus greatly simplifying the entire transmission. The disadvantage is that the weight of the vehicle is supported by links, which can’t handle high loads, thus limiting the possible weight of this walker.
You may note that the legs have been equipped with rubber tips. It was done partially to reduce the slip and thus improve the walker’s movement, but the primary reason was… the sound. If you watch the video and find walker’s movement creepy, rest assured that it’s nothing compared to the sounds of its stamps. It sounds so unnerving that I got rid of all-plastic legs after just a few test walks.
As mentioned before, I was trying to keep the walker reasonably small. It can be, however, made larger and faster by simply increasing the spacings between its pairs of legs. This would make it possible to use longer legs, resulting in faster movement and in taller vehicle, able to walk over greater obstacles. Still, the solution where walker’s weight is supported by links alone, despite the greatly simplified and efficient transmission it provides, is most likely unfit for larger and heavier walkers. These will most likely require a different leg design, structurally stronger and with higher level of complexity. I find it exciting that after many years of building I still have brand new areas to explore.
Photos:









Instruction:














@bachaddict
I don’t recall exactly, but I spent single evening on the legs.
How much did you work on the leg timings? If the towball on the belt wheels and the crank underneath are 180 degrees apart, a crank would work just the same on top. In the photos different legs appear to have different towball spots.
I’m using the base mechanic for my TC6 entry on Eurobricks 🙂
@Jules
With all due respect, this thing is dead simple and needs literally just a few various parts. I’m sure you can manage.
Fabulous, just what my son was looking for. I wonder, however, was a parts list omitted for a reason? Can I find the list somewhere? I read the instructions but there was no mention of the sizes or all of the parts, which is very frustrating.
I love this thing! I want to build one (with your instructions). I like your hamsters “Big Escape”!
Well done!
@Ev3fan
Because it would need to be very long to prevent legs from colliding, and it would be unstable when turning.
Why don’t make a Six-legged walker with articulation between First and second and between second and third pair of legs ? Thale would Look Even more natural. A Walking insect Model with studfull hull would be SO awesome !!!!
Great. Thank you.
@Ev3fan
Sure.
But would it be possible ?(Maybe also with an NXT??) I’m thinking about building a walking robot because I’ll get ev3 in summer.
@Ev3fan
I don’t have ev3 unit and I don’t plan on buying one.
I wonder wheter you could use this with an ev3unit and two big servo Motors and turn this into a robot?Or would the Weight Be too Big? Anyway, Great work! I cant stop thinking about this idea. Why don’t try to build a bigger one without the flexible Links and a more complex chassis? That would Be really amazing!
that is a brilliant model, hope to build it myself some day 🙂 also, a possible challenge for you, if you could rebuild this in a way that each leg is on its own pivot, so in a sense, “walker suspension”
made my own version of this a while ao, very impressed!
@Michael
It’s just a handful of pieces, all of which you can see in the instruction.
Hi, great thing to build… I am doing my “very first steps” in own Lego tec creations and would like to learn from that, could you provide me with a list of parts needed? The step to step building instructions is great! Thanks in advance… M.
@arjan
I have to admit that what you did is really impressive! It even seems to walk better in your version 🙂 I’m really glad to see it, that’s why I like to share ideas – because sometimes someone takes them further than I did. Congratulations, job well done 🙂
I’m a fan of your work for quite a long time, and you did an excellent job with this walker.
But i think that you were a little bit unright by saying that it is ‘is most likely unfit for larger and heavier walkers’. I’ve rebuild your walker (forget about the colors), and changed it into a tank or something, but i was able to make it around 2,5 times as heavy as your walker.
Here is my proof: http://www.youtube.com/watch?v=Sbcb6b099Og
congratulations! I´m have to say that I´m your fan!!
Again and again, simple is beautiful but simple requires lots of cleverness.
Congrats Paul !
HS
@Alexis : tu es le seul Français à poster ici en Français : fais au moins en sorte d’écrire des mots en français avec des phrases qui veulent dire quelque chose ! C’est quand même facile d’aligner 2 mots corrects non ?!
/HS
Neuro
@Phillip
I could, but it would move in pretty much the same way.
I have an idea about this. Perhaps you could attatch a logitudial subtractor.
@Reblurr
Um, I’m afraid no. It was so creepy that I never recorded it. But imagine the sound of clicky steps, unobtrusive but persistent, tireless, coming closer and closer and seeming to grow louder when you’re not looking…
Simply AMAZING!!!
gotcha, thanks!
do you have a sound clip of that the “creepy” sound for us to enjoy? ;-P
@Redblurr
No, but you can just check what parts are needed in instruction and multiply it by 4.
Do you have a master parts list for this??
that is awesome! Cannot wait to see what new walkers you come up with!!!!!!
so I think you hit the simplicity. it looks like the timing might be off a little though. I don’t know though. I could be wrong. I’m looking forward to seeing what you make next that walks.
hi me again, love it! it is one of your best if you ask me. looks a bit creepy the way it moves along though.
pretty cool
@elektrownik
Raczej się nie uda.
Zbuduj to: http://acarol.woz.org/antikythera_mechanism.html Może da się uprościć konstrukcję…
I will build this it is so cool.
Aż szczena opada , po prostu brak mi słów .
Pozdrawiam
Reminded me of this: http://melbournehouse.kknd2.com/series9/mobile_oilbot.html
It’s impressive.
Je suis un granf fan de t’est construction. Je commence enfin a faire mais petite invention avec beaucoup de mal. Ton octopod est super et merci pour les instructions de construction !!!!
Nice one. This can’t probable be used in the TT’s. Maybe a new kind of contest for you and your fellow TT’ers?
I think if a bigger pulley is put on top o each leg the ocptopod would be able to climb onto slightly bigger objects…when walking on lego in fact it was not able to pull out completely the leg from them…this idea it should be tested empirically tough…
@will
Yes, obviously.
are you going to build more walkers in the future
Don’t get me wrong, it’s great, and I do understand that its built for maximum simplicity, and minimum weight, but I still like this better. http://www.youtube.com/watch?v=a5f0vVQLBPQ
This is just about my favorite walker. 🙂
very cool and simple MOC
This is very nice MOC. Thanks for sharing the Building Instructions!