Pneumanipulator

An unusual remote manipulator, powered by 4 motors and pneumatics.
Datasheet:
Completion date: 24/06/2007
Power: electric (wire-controlled) / pneumatic (fed from external electric compressor)
Dimensions: height 60 studs / length 90 studs
Weight: unknown
Motors: 2 x 71427, 1 x 47154, 1 x 2838
Pneumatics: 1 circuit with electric compressor
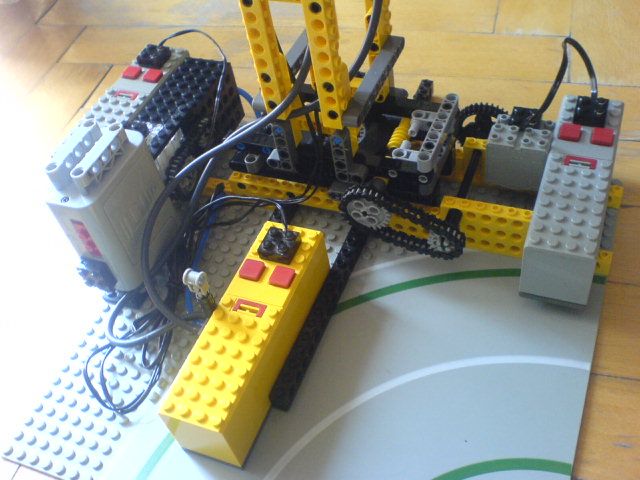
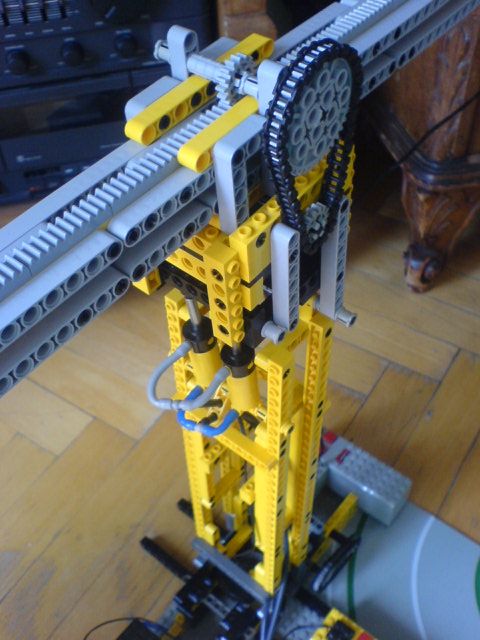
This construction is a result of a larger number of motors finally available to me. There are 4 of them used in here, and one of them drives the compressor that feeds a simple pneumatic system. The manipulator itself has a middling level of complexity, but its construction is quite unusual. The most unique feature is the entire ‘arm’ section able to shift forwards and backwards through the supporting middle section. The middle section is able to rotate at full 360 degrees (with all the wires going through the center) and to pneumatically raise or lower its top, along with the entire arm. At one end of the arm is the 2838 motor driving the grasper, and the grasper itself is at the other end of the arm. Thus the motor serves as a counterbalance, rendering the whole structure fair stable. The grasper consist of 4 coupled fingers, and is precise enough to hold a pen. The use of motor to power it, however, is somewhat bad idea, as locking a single finger stops the entire grasper. Using a separate pneumatic cylinder for each finger would be a much better solution, allowing it to adapt to the shape of the grasped object.





















@Kshomiv
You know, you can just look at the date.
This must be one of your older models, because I see the old type battery boxes and a battery box that looks like a PF one, but it has the old type wires going to it.
Nice and original. I missed pictures from the pneumatic part though…
4 battery boxes?!? 4 motors?? A compressor?!? 1.21 gigawatts? Great Scott!
This thing is really cool. It is different than anything I have seem before which in itself is hard to accomplish.
That’s one sleepy dog.