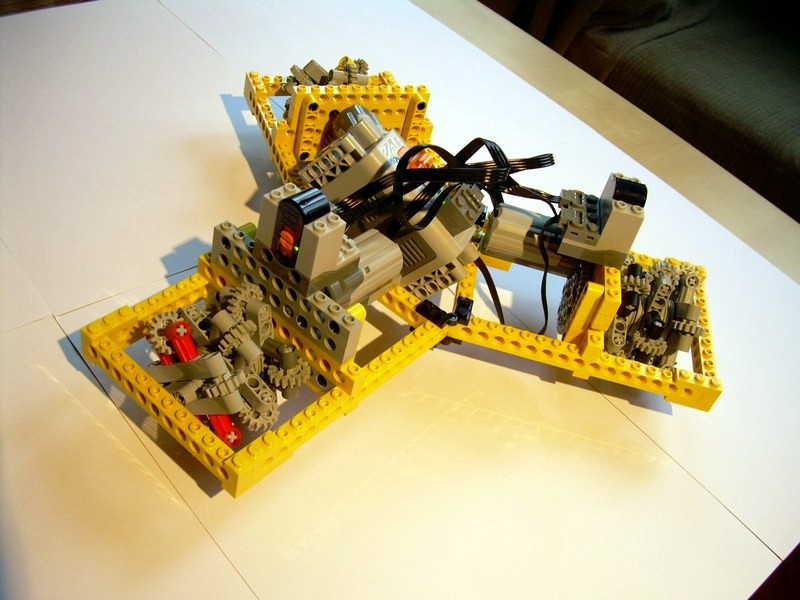
Killough Platform

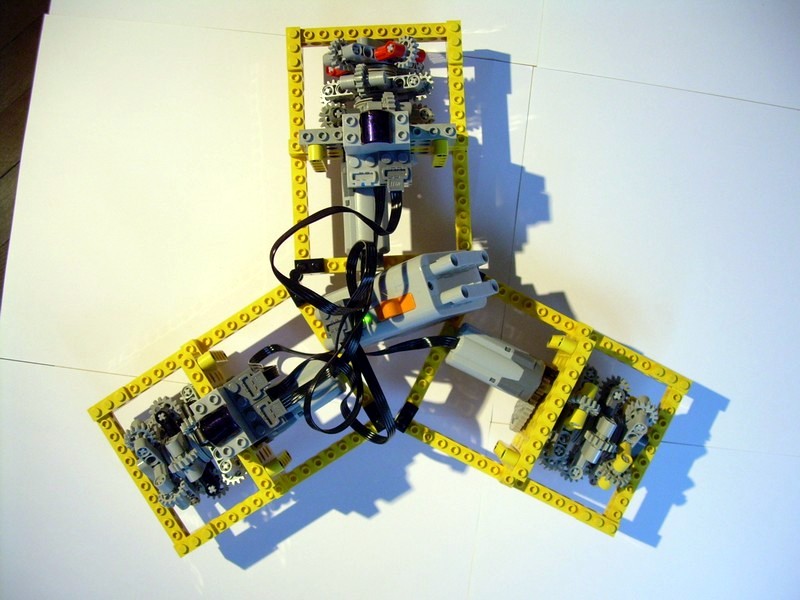
A vehicle capable of holonomic drive, that is moving in any direction without need to turn. Features three omniwheel modules and full manual steering.
Datasheet:
Completion date: 15/03/2008
Power: electric (Power Functions)
Dimensions: 42 studs in diameter
Weight: 0.56 kg
Suspension: none
Motors: 3 x PF Medium
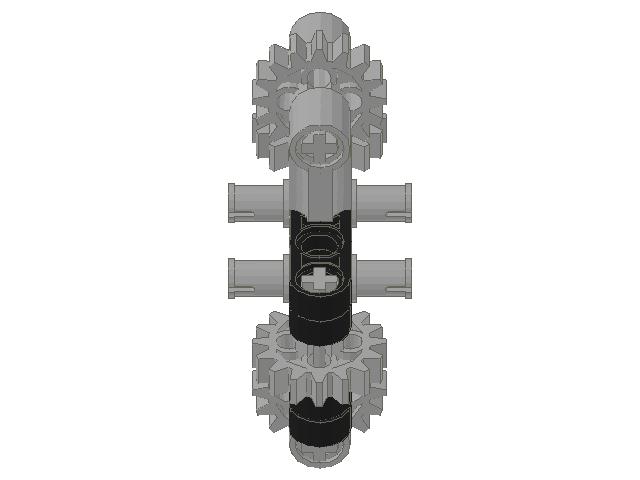
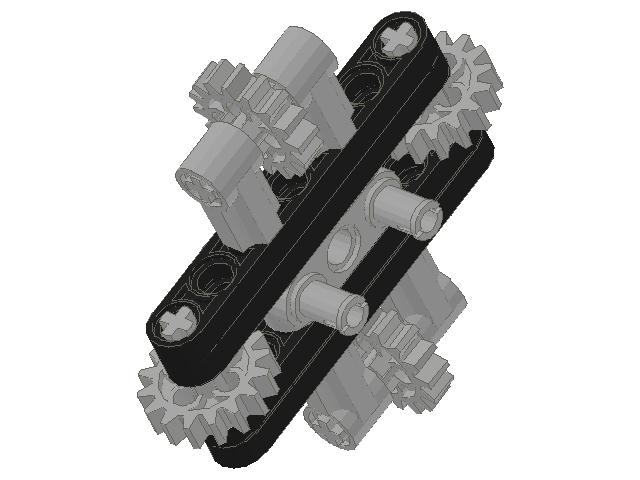
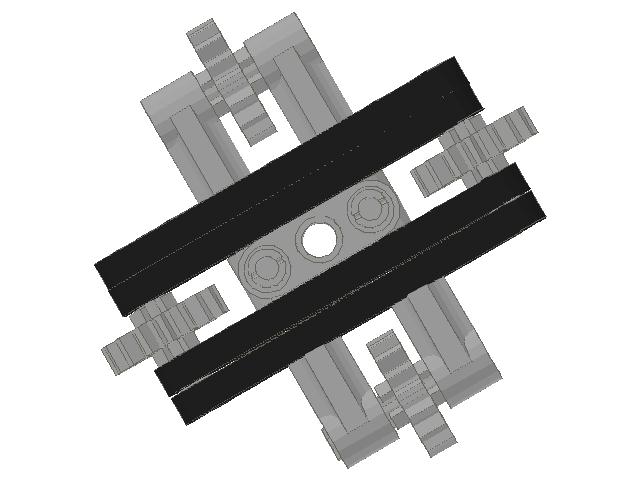
Killough platform is a relatively recent invention, even though the idea of a holonomic drive is not new. It is a vehicle able to move in any direction whatsoever without turning – but it can turn too, of course, even in place. Over centuries, there has been a number of ideas on how to propel such a vehicle – the Killough solution is the use of so-called omniwheels. Omniwheel is a wheel capable of moving in two directions, and it usually consists of a number of smaller wheels that are transverse or oblique in relation to the entire module. A very good and simple example of an omniwheel looks like that:

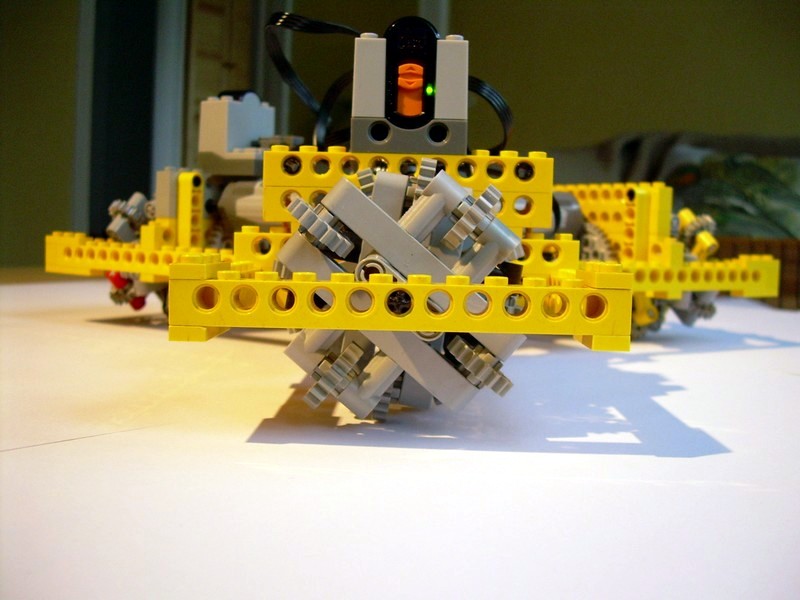
It is very characteristic for the Killough platform to use three omniwheels, forming an isosceles triangle. All the omniwheels are driven, usually at least two of them at the same time to achieve a desired movement.
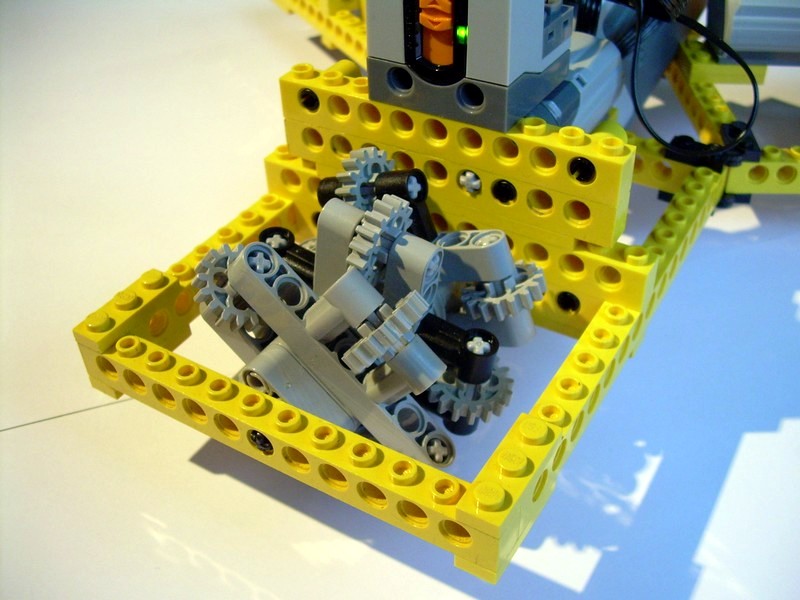
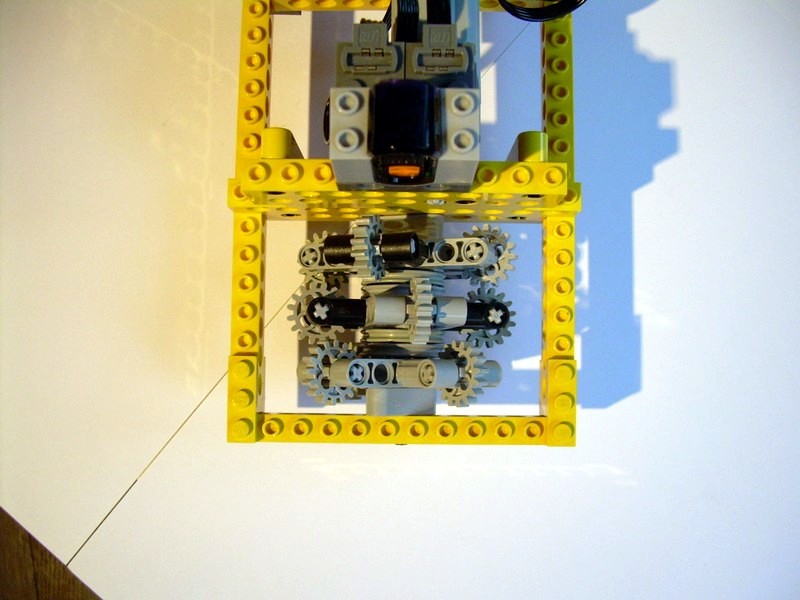
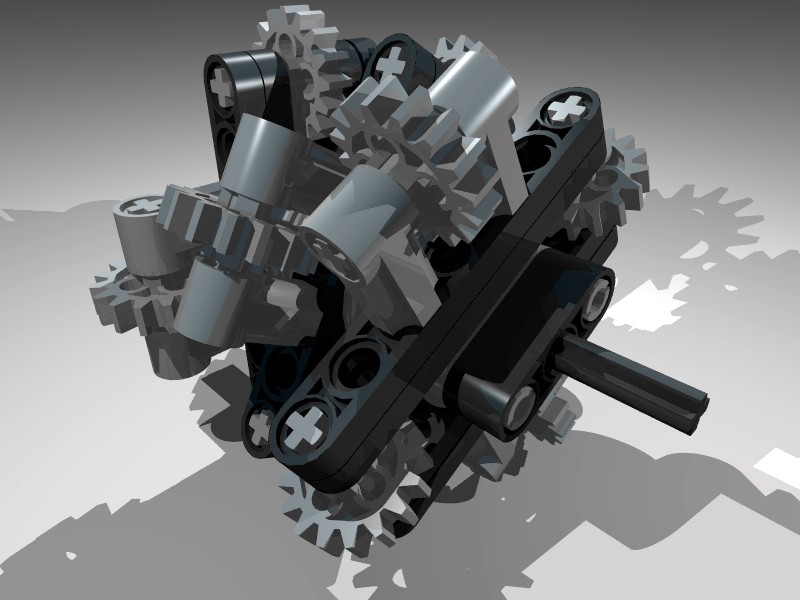
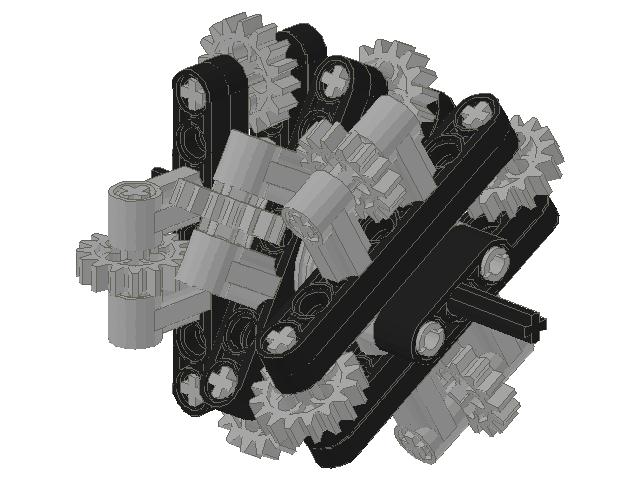
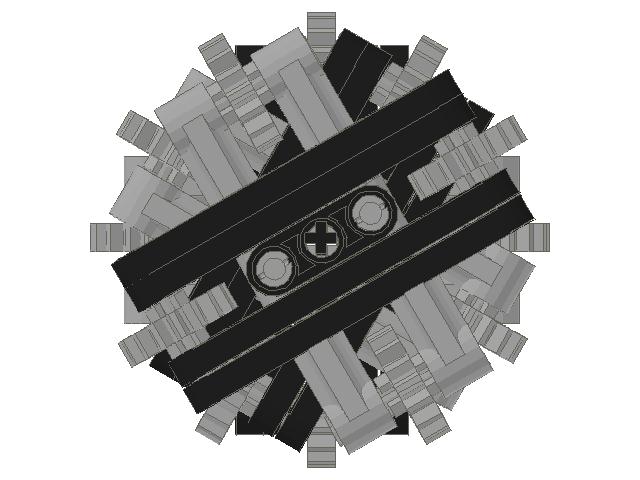
In my model, I have obviously used three identic omniwheel modules too. There is a number of holonomic vehicles built with Lego bricks, especially in the area of Lego Mindstorms – some of them greatly simplified, some of them quite advanced. I didn’t want to rely on any of them, therefore I created my very own omniwheel that consists of three identic modules, each with 4 wheels. Since the entire vehicle required 36 small wheels of the same type, I decided to use 16-teeth gears for that. There are diagrams of the entire omniwheel and its modules among the photos below.
The model proved quite capable of holonomic movement, although the 16-teeth gears offered little traction. The main disadvantage of the project was the etirely manual steering, which required driver to use two PF handsets at the same time, and to control up to three independent motors simultaneously. With the use of Mindstorms unit, the vehicle would be certainly capable of some more advanced manoeuvres.



Hi chief engineer,
I was wondering how the motors actually drive the wheels.
As far as i could see there are just pin-holes in the elements, so the wheel might stay in place while drive shaft is revolving.
This might have been what Neil meant with his question.
Looking again i noticed the pulley wheels, with their six pinholes, and understand how you did it 🙂
And this is merely one of all your astonishing achievements…
Much respect
@Neil
Do you mean gear ratio?
whats the gear train from motor to wheel?
you are insane. i wish i had enough money to get the peices for some of the projects you do. this is really cool