Twin-radius Tank Steering System
 An idea for a mechanism that allows realistic tank-like control of tracked vehicles.
An idea for a mechanism that allows realistic tank-like control of tracked vehicles.
Last year I have driven a T-55 tank and in the process became familiar with the controls of a Soviet tank of this era. What surprised me was the lack of any form of a proportional speed control – instead, the lever controlling each track had three positions: stop, half speed and full speed. While trying to figure out how to make a LEGO model with controls working this way, I have developed a drive/steering system that may be considered an reasonable alternative to subtractors.
Building instructions available here: sariel.pl/downloads/
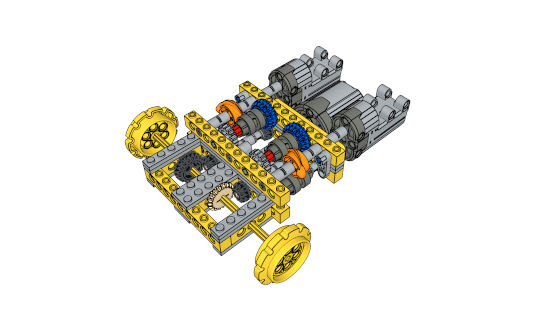
The mechanism is fairly simple. It splits a single driveshaft in two and then puts each of these two shafts through a small 3-speed remotely controlled transmission, with speeds arranged so that when using PF Servo for shifting and PF remote for remote control, the levers on the remote work exactly like levers in the real tank. The only difference is that because of gear ratios the middle position isn’t 50% speed but 60% speed, and that the remote’s levers return to the middle position when released. This effectively allows to drive at two different speeds and to turn with two different radiuses. It’s also fairly easy to add a transmission and/or a piston engine between the drive motor(s) and the mechanism, and – unlike with a subtractor – they will work both when driving straight and when turning.
The primary advantages of this mechanism are realistic controls and ability to use a transmission and/or a piston engine at all times. There are no differentials needed, which is another advantage because their inner gears can be broken under high torque. The disadvantages include the need for two PF Servo motors to control the mechanism and a larger size and higher number of specialized pieces when compared to a subtractor.
Video:
