Monowheel steered with torque effect
 A simple monowheel with experimental mechanism allowing it to turn left and right.
A simple monowheel with experimental mechanism allowing it to turn left and right.
Datasheet:
Completion date: 13/04/2018
Power: electric (BuWizz 2.0)
Dimensions: length 20 studs / width 12 studs / height 20 studs
Weight: 0.555 kg
Motors: 2 x PF M
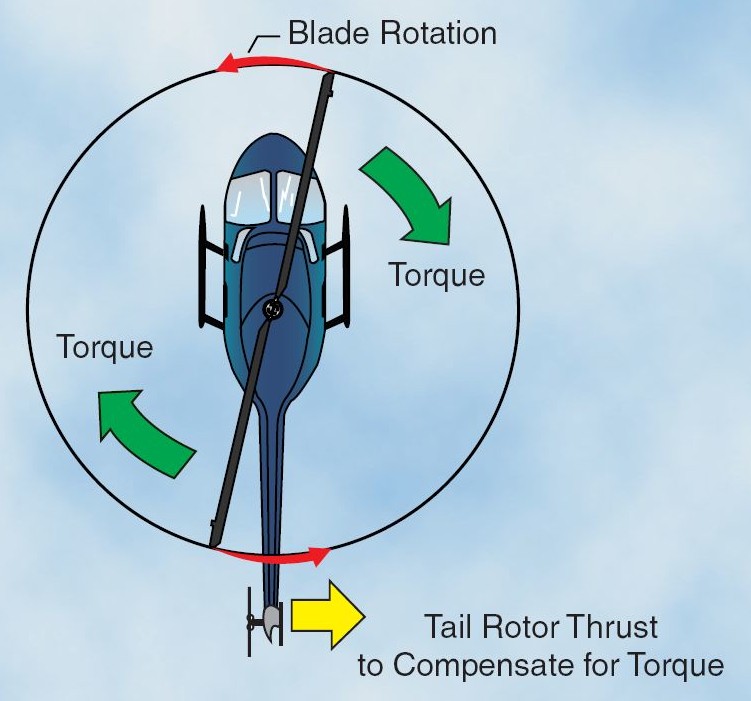
Another “proof of concept” type of creation. I like monowheels – in fact I’ve built a number of them before – but their essential problem is steering. Since a true monowheel is located inside a single wheel, it lacks the ability to turn left or right. I was curious to see if this could be circumvented by relying on Newton’s third law of motion: that for every action there is an equal but opposite reaction. One of examples of this law is so-called torque effect, which occurs in propeller-driven aircraft. For example, when a plane rotates its propeller, the propeller also rotates the plane, proportionally to the difference in their weights. That’s why a single-propeller planes tend to tilt to one side, and why planes with two or more propellers have counter-rotating propellers. Another example are the helicopters: when a helicopter rotates its rotor, the rotor also rotates the helicopter, and hence tail rotors are needed to maintain and control the helicopter’s direction (another solution is using two counter-rotating coaxial rotors, the prime example of which is the Kamov Ka-50 Hokum).
Based on the effect observable in helicopters, I have come up with an experimental monowheel equipped with a horizontal wheel inside the main outer wheel. One motor was driving the outer wheel, providing forward/backward motion, and the other was driving the horizontal wheel inside it, which was centered around monowheel’s center of gravity and was supposed to act like a rotor. For this purpose, I have selected a large and heavy wheel and geared it up 1:3 from a PF M motor, based on my observations of its efficiency. After some adjustments and balancing of various factors I was able to get the monowheel to drive and steer, and I have observed the following:
- the efficiency of steering with a horizontal rotor seems to depend on the ratio between monowheel’s weight and traction versus rotor’s size, weight and speed of its rotation
- the rotor works best when centered around monowheel’s center of gravity (which in a monowheel also determines its point of contact with ground) and perfectly horizontal. Running the rotor when it was in nearly vertical position usually resulted in the monowheel being knocked to a side.
- the crucial factor is finding balance between the width of monowheel’s outer wheel and the efficiency of its rotor; a narrow wheel is easier to steer but also easier to knock to a side, while a wider wheel is more stable but needs a more efficient rotor to be turned; in fact, I have started my test with a 2-studs wide outer wheel and proceeded until a 5-studs wide one to obtain a satisfying stability.
In the end, it seems that while the monowheel was working as expected, it didn’t exactly rely on torque effect as much as on rotor’s inertia. That’s why every time the rotor was run, it would turn the monowheel only by a certain amount of degrees rather than turn it indefinitely. I believe it had to do with rotor’s acceleration and deceleration, which were both finite; once the rotor stopped accelerating and reached its top speed, it would no longer cause the monowheel to turn.
A while ago I have tried to use a horizontal rotor to steer a biped (a 2-legged walker) but it didn’t work there. I suppose this was because the two legs meant two points of contact with the ground, none of which was aligned with walker’s center of gravity. In the end, building and driving the monowheel was an interesting experiment on kinetics.
Photos:







Video:
