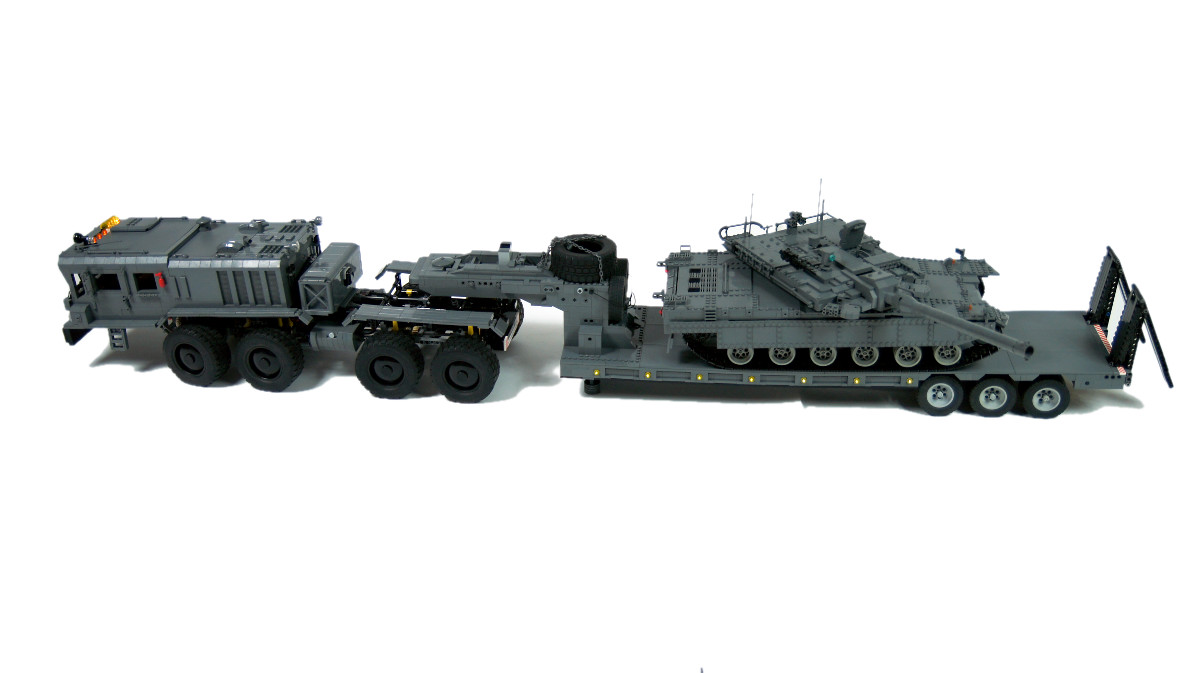
KZKT 7428 Rusich

Model of the KZKT 7428 Rusich tank transporter. Features remote control over Bluetooth using the NXT unit, remotely locked fifth wheel and independent trailer with working outriggers and ramp.
Datasheet:
Completion date: 03/05/2013
Power: electric (Power Functions / NXT)
Dimensions:
truck: length 85 studs / width 26 studs / height 27 studs
trailer: length 134 studs / width: 24 studs / height: 25 studs
Weight: truck: 3.357 kg, trailer: 2.538 kg
Suspension: full independent
Propulsion: 1 x NXT motor geared 7:1
Motors: truck: 3 x NXT motor, trailer: 2 x PF Medium motor
KZKT 7428 Rusich is one of many Soviet-built 8×8 prime movers, designed to tow loads up to 70 tons over any terrain, under any weather conditions. It’s powered by a 650 HP engine with a pre-heating system that allows it to operate even in -50°C (AKA “Siberian summer”), and makes it powerful enough to tow glaciers around. I have discovered Rusich after I’ve decided to build the K2 Black Panther tank, and the two were designed to operate together from the very beginning.
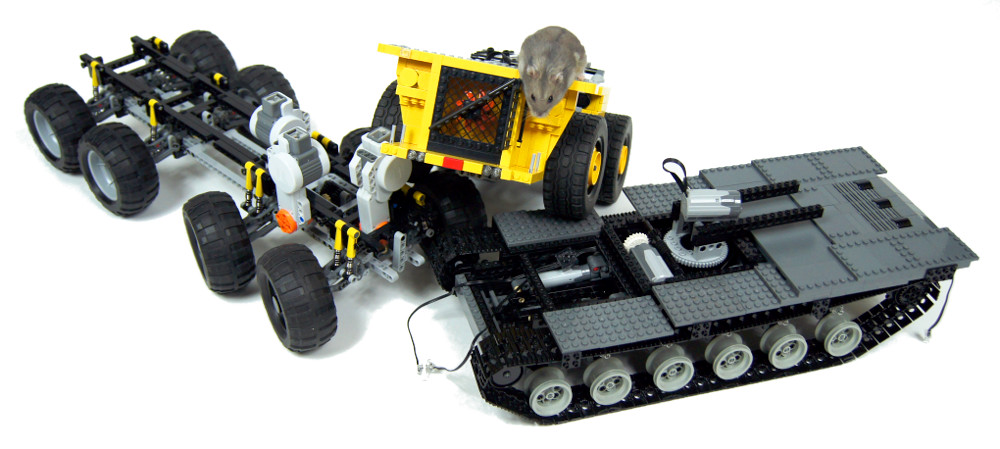
Pictured below: the Rusich radiating awesomeness

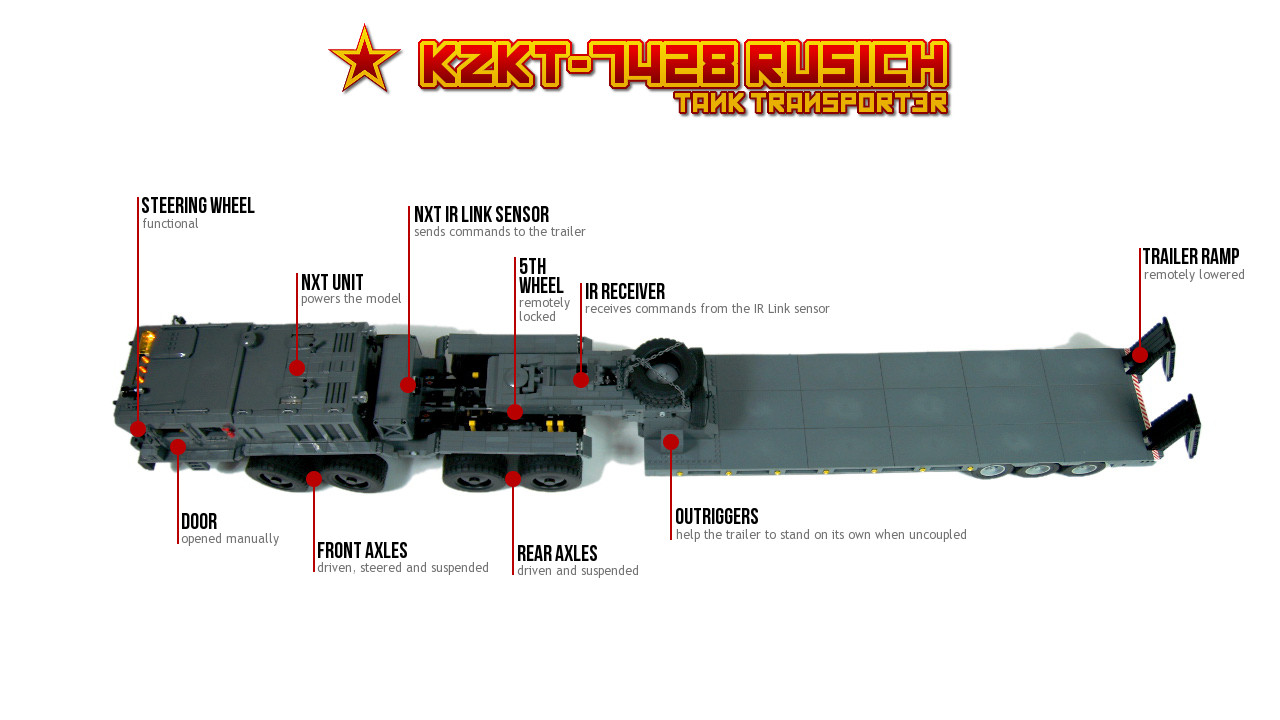
The truck was fitted with a full independent suspension and 8×8 drive, with steering on axles #1 and #2. To compensate for the very heavy, protruding cabin, the first axle was fitted with 6 hardest shock absorbers, the second with 4, the third with just 2, and the fourth with 4 again. The body was studfull, sitting on a studless chassis. This resulted in a good look and a compact, functional chassis, but also meant putting a lot of weight on top of a body frame that was prone to some bending, making the truck’s front end sag a little. The independent suspension was not necessarily the best choice for a model that front-heavy, but I believe it supported the weight properly and kept the drivetrain relatively unburdened.
The truck was able to drive well on its own, although it clearly had poor grip on two rear axles. The handling was much improved with the trailer connected.
The trailer, while simple, proved challenging for purely structural reasons. It was basically a 1 meter long structure supposed to carry a 2.5 kg heavy tank model while supported on its ends. That meant a lot of structural stress, and even though the trailer’s “deck” was built around two rails of solid Technic bricks 2×2 studs thick, increased to 2×3 studs (that is 16mm x 24 mm) with addition of tiles of top and plates on bottom, it was still bending a little under the tank. The trailer was supposed to operate independently, so it carried its own power supply in form of a Power Functions AAA battery box. It powered lights on the sides of the trailer, the PF Medium motor controlling the rear ramp through a pair of small linear actuators, and another PF Medium motor with another pair of small linear actuators acting as parking outriggers in front. The ramp was supplemented with sections of rubber axle joiners, taking part of its surface, to improve tank’s grip – still, it proved practically impossible for the tank to climb up. The outriggers, on the other hand, worked perfectly well, and proved strong enough to lift the trailer’s front even with the tank sitting on it.
The trailer was intended to be coupled and uncoupled remotely, so its only connection to the truck was a short studless boom that could rotate, allowing the truck to turn with the trailer. The boom went into an opening in the truck’s chassis going from the back to between axles #3 and #4, where it was secured in place by a simple studless lock. The lock was operated by the truck’s third NXT motor, using a linear clutch and a worm gear to prevent yielding. It proved to work very well, and the coupling procedure was: to back the truck up aiming at the trailer’s boom, stop the truck, lift the trailer’s outriggers until the boom rested on top of the truck, lock the boom and drive off.
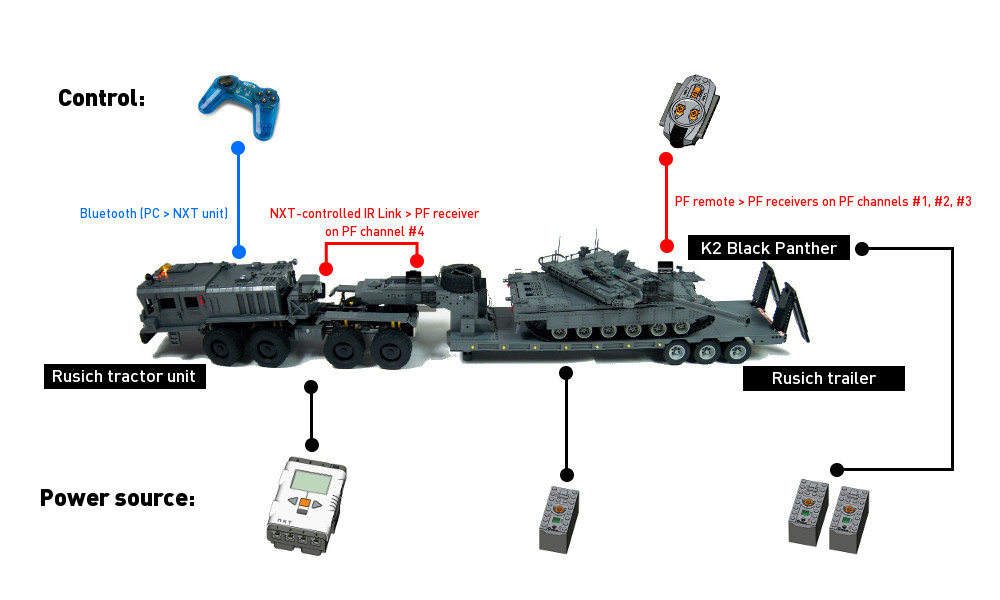
The whole “tandem” was rather complex when it came to control system and power supply. I wanted both the truck and the trailer to be able to operate simultaneously with the tank, which used three PF channels. So, I decided to use the fourth and last PF channel to control the trailer, making the truck fully NXT-operated. A single NXT unit went into the engine bay of the truck, where – fully enclosed – it would be connected to my PC over a Bluetooth link, and steered with a regular control pad. The drive and steering were both controlled proportionally. The trailer, which was supposed to be a stand-alone unit, carried its own power supply and a single PF IR receiver. Thus, it could be controlled at any point in one of two ways: directly from the PF remote used to control the tank, by just switching to a different channel, or through the NXT IR Link sensor sitting in the truck’s rear fuel tank. The sensor sent commands to the receiver sitting on top of the trailer’s boom, well within its range, and it was operated from the same control pad as the rest of the truck. It provided a very convenient truck/trailer control system, with a single pad allowing to control both at any moment and practically any range. The PF remotes were only needed to operate the tank, and could also be used at ant moment.
There was a wide combination of power sources used; the truck was powered primarily by the NXT unit, but also housed a small 9V battery box that provided power for its lights. I was at one point considering motorizing the truck’s windshield wipers, but it’s roof was too thin to allow both this and the system of lights on top of the cabin. The trailer, as mentioned above, carried one PF AAA battery box inside. Finally, the tank was powered by two rechargeable PF batteries, one for the propulsion system and one for everything else.
It should be noted that the truck and trailer were largely similar to my model of the SLT Faun tank transporter from 2008. However, I believe they have vastly improved over it.
The truck and trailer were both plagued by a number of problems resulting from large sizes and loads involved.As it turned out, the worst problem was the lack of easy battery replacement option in the truck’s NXT unit. Even with high-end batteries, it made the truck nearly run out of power by the end of the filming, and it was barely able to tow anything, even though it easily tows a tank on the trailer at the video’s beginning (0:22). Using the rechargeable batteries for NXT would probably provide a solution to this, but they are very rare, expensive, and make the NXT unit even bigger.
In the end I was happy primarily with having finished the model, which took plenty of time and parts to build. It turned out essentially successful, with all functions working as intended, even if slow and strained. Its main goal was to find a way to play with multiple roughly same-scale models at the same time, and this is where it performed flawlessly. I have always been deeply impressed when seeing one model carried and then deployed from another on various RC models shows, and it’s been my longtime goal to do the same with LEGO models, without compromising their size, functionality, or their amount of details. In this, I consider Rusich a definite success.
Gaming pad control program:
#pragma config(Sensor, S4, HTIRL, sensorI2CCustom)
#include "drivers/HTIRL-driver.h"
#include "JoystickDriver.c"
tPFmotor Ramp = pfmotor_S4_C3_A;
tPFmotor Outriggers = pfmotor_S4_C3_B;
task main()
{
bMotorReflected[motorA] = false;
bMotorReflected[motorB] = false;
bMotorReflected[motorC] = false;
while(true)
{
getJoystickSettings(joystick);
motor[motorA] = 0;
motor[motorB] = 0;
motor[motorA] = joystick.joy1_y1 / 1.28;
motor[motorB] = joystick.joy1_y2 / 1.28;
nxtDisplayCenteredTextLine(0, "BATTERY: %3.1fV", nImmediateBatteryLevel / (float) 1000);
nxtDisplayTextLine(2, "A: %d", motor[motorA]);
nxtDisplayTextLine(3, "B: %d", motor[motorB]);
if(joy1Btn(1) == 1)
motor[motorC] = -100;
else if(joy1Btn(3) == 1)
motor[motorC] = 100;
else
motor[motorC] = 0;
if(joy1Btn(6) == 1)
{
PFMotor(Ramp, 7);
nxtDisplayCenteredTextLine(5, "Ramp >>");
}
else if(joy1Btn(8) == 1)
{
PFMotor(Ramp, -7);
nxtDisplayCenteredTextLine(5, "Ramp <<");
}
else if(joy1Btn(5) == 1)
{
PFMotor(Outriggers, 7);
nxtDisplayCenteredTextLine(5, "Outriggers >>");
}
else if(joy1Btn(7) == 1)
{
PFMotor(Outriggers, -7);
nxtDisplayCenteredTextLine(5, "Outriggers <<");
}
else
{
PFMotor(Ramp, 0);
PFMotor(Outriggers, 0);
nxtDisplayCenteredTextLine(5, "Idle");
}
}
}























@Sariel
In addition, the EV3 motors are compatible with the NXT.
@Bob
I have no idea. But I imagine it has a lot.
Second and last question (before you think I’m spamming again) you don’t know howmany gears the real kzkt’s gearbox has, right?
@Bob
Around 1:14.
In what scale was the kzkt 7428 Rusich build?
@Old Man Jenkins
I don’t know. But when I use Google – highly recommended – I get this: http://www.military-today.com/trucks/kzkt_7428_rusich.htm
What type of gearbox does the actual Rusich have?
@Myeong Mo Kim
I don’t have the EV3 set and I don’t plan to buy one.
I like the studfull design! I wish I had more bricks XD
p.s. I think you are able to build smaller mindstorms steering systems with the EV3 medium motor. The nxt motors seems a bit bulky…
@Robert
Tak, to są koła od Unimoga. Na dwóch XLach jeździłby nawet sporo szybciej.
Witam, czy koła w ciągniku są to koła od Unimoga, sam ciągnik o tej masie jeździłby również na 2 silnikach PF XL?
@Stan
You are mistaken, these are these wheels: http://www.bricklink.com/catalogItem.asp?P=6595
The whole MOC is purely awesome! I would like to give it a try and build a tank myself one day, hopefully it will resemble some of your creations 😀 The wheels that you use on your tanks seem o work great with the tracks. Do you use part 6580 or am I mistaken? I would like to make sure before I order a whole batch 😉
@ctw100s
Maybe one day, if I have time.
Are you planning on making any NXT Robots? (with sensors that make it do many tasks without controlling it)
i did not know the nxt oud power such a heavy thing
i guess that is why it is slow
@ron
Well, this type of suspension is described in detail in my book.
Hello Sariel.
Great job this truck, truly impressive!
Is there any way you could give me an idea as to how I could do a steered and driven Tatra type supension?
Thanks.
Cheers Sariel! Great work, as usual, quite amazing! Can you let us know which construction u have used for the independent suspension? It’s not quite visible from the pictures. I’m struggling hard since a long time to build a somewhat similar 8×8 chassis for mobile cranes, etc. But they were either too large for my taste, or unrealistic.
@Lucioswitch
I don’t have any other pictures than shown here.
@Sariel
I meant what you see at 1:32 min into your movie.
I had the same problem with one of my “old” MOC who had a similar suspension system. Now I’m doing another MOC even heavier (almost 9Kg) and the problem is obviously compounded. I try to reduce it but without good results. Could you post a picture of the 1° or 2° axle suspension without wheel?
Thanks in any case.
@Lucioswitch
No, not really. I was expecting it to handle heavy load, so I made it strong.
Hi Sariel!
Did you have some problem with steering and independent suspension? Backlash between the first and second axle? or between left and right wheels?
If yes,how did you solve it?
@jonathan
They are never going to be available.
well could you notify me whenever the instructions are available?
@jonathan
No, sorry.
do you offer instructions sir, I only need the part of the automatic coupling king pin (hitch)
@Mees
Until I learn leJOS, yes.
do you only use robotC when you program the nxt?
it`s too heavy at the front
and, of course, great MOC!
@Sariel no, this mechanism ist comlex, its just linear clutch. or make a hamster-powered car 😀
@artur
Won’t work. Hamsters are too weak and too light to move complex mechanisms.
you really should make something that your hamster will cotrol, i have an idea: get the hamster in ball, and put ball on 4 wheels. when ball will rotate power will be transfered through linear clutch to the PF IR transmitter.
@Sariel
Haha! The wonderfull life with only a hamster to feed.
@Sander
I don’t have a recharging budget problem. I have a problem with removing the batteries from the NXT unit for recharging.
Impressive. I really like the coupling mechanism. For your recharging budget problem, try IKEA batteries. In the Netherlands it’s a far more cheaper option. Con ofcourse is that it costs you 20% in power… Compared to regular batteries
you are a best
you’ve outdone yourself this time!
@Danielius
Have you read the Paragraphs upon paragraphs he took the time to type about this very build?
Really cool but the front I think its to heavy@Sariel
Myśle ze juz ma inspiracje ale do budowy;), na kolejne urodziny zażyczył sobie Twojego Vityaz DT-10, a na kolejne Twoje czołgi i najnowszy model (i co z tym fantem zrobić;). Myśle ze dla dzieci jest to najwieksza frajda rozbudowująca i pobudzająca ich wyobraźnię. Oczywiscie powodzenia w kolejnych konstrukcjach. W Jeepie mamy tylko mały kłopot z napędem – koła żebate 20 i 16 czasem przeskakują (przy podjazdach). nie wiemy jeszcze czemu. Jeśli masz może jakieś sugestie to z miłą chęcią posłucham.
@Robert
Dzięki. Mam nadzieję, że młody będzie miał też inspirację do nauki angielskiego 😉
Wspaniala konstrukcja, rewelacyjna oprawa wideo, ujęcia no i oczywiscie aspekt humorystyczny. Pomysłowość , sposób łączenia klocków różnych serii i stawianie na – ogólny wygląd oddający jak najbardziej realistyczną maszynę. Każda Twoja nowa konstrukcja to olbrzymi oprogres w budowaniu oraz projektowaniu nowych modeli choć dla mnie nr 1 – to Pagani Zonda oraz K2 Black Panther. Gratuluję raz jeszcze. Przy okazji dziękuję za ogólnodostpną instrukcje do Jeep-a, na jej bazie dla mojego syna 5,5r zbudowałem model Rubicon-a z licznymi modyfikacjami.
Really amazing! Congratulations!
wooooooooooooow! That’s amazing! the truck doesn’t look very powerful ’cause it seems that it’s hard for it to go over that wheel in the video, but the body is one of the nicest you have done (in my opinion). The MOC is a perfect combination of many interesting functions (your use of NXT system is really clever) and a good looking body with many details; Icould never do anything like this. You’re a genious!!!!!
I like how you integrated the Lego Mindstorms NXT in this model!