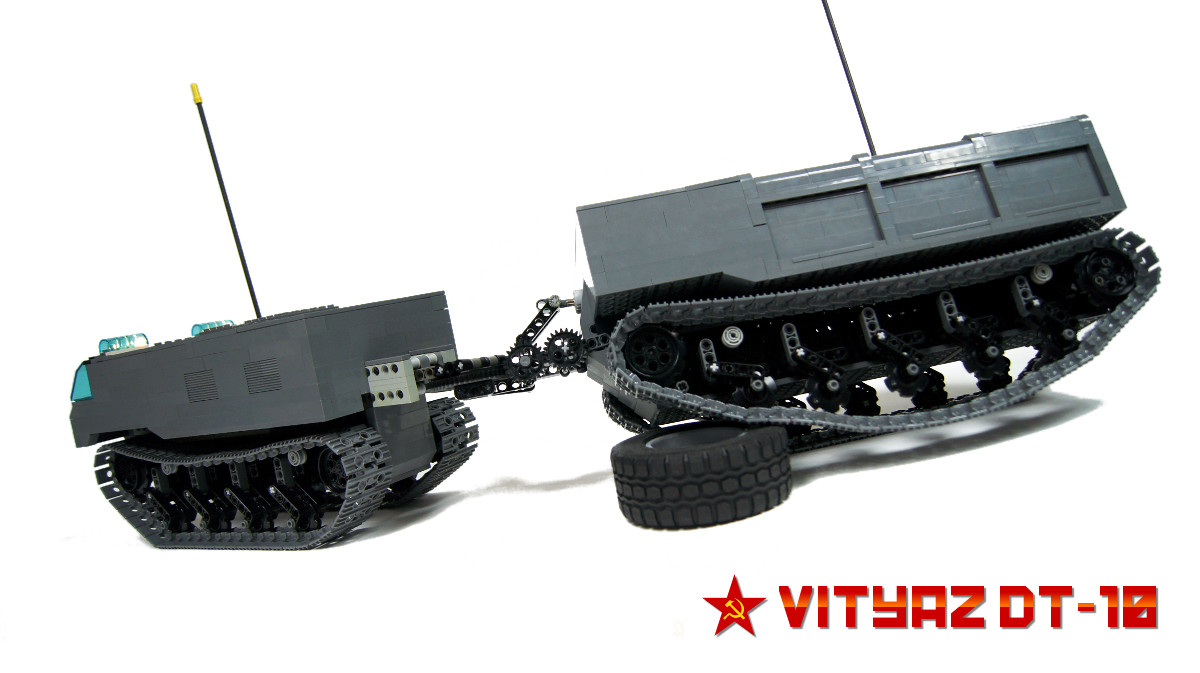
Vityaz DT-10

Model of a Russian all-terrain tracked transporter. Features full suspension, articulated steering and ligths.
Datasheet:
Completion date: 23/12/2012
Power: electric (RC unit / battery box)
Dimensions: length 94 studs / width 16 studs / height 19 studs (not including antennae)
Weight: 3.273 kg
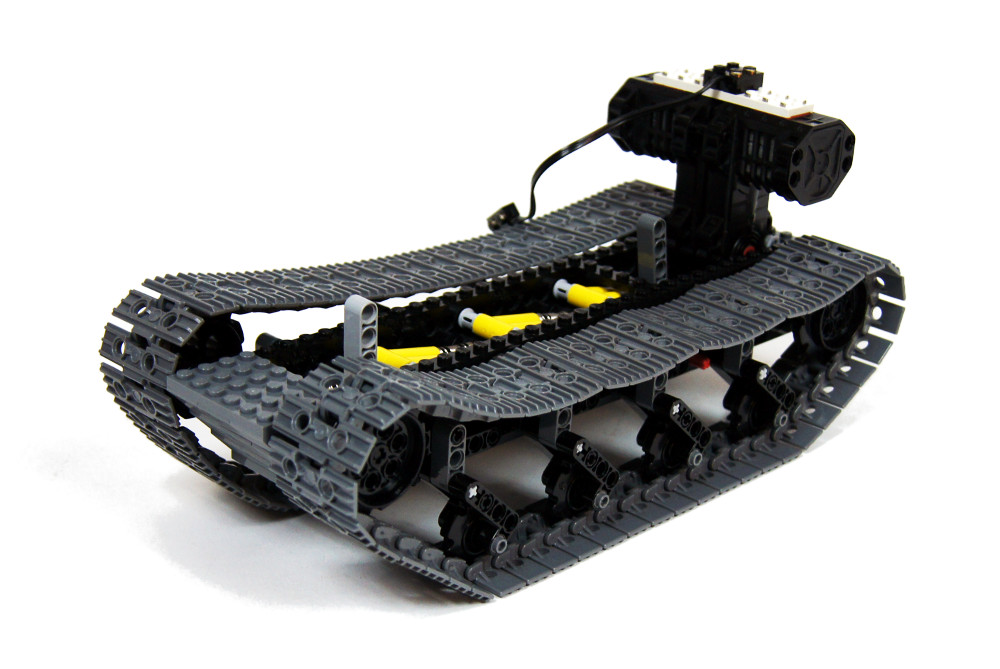
Suspension: full independent
Propulsion: 4 x RC motor geared 3:1
Motors: 4 x RC motor, 1 x PF L, 1 x PF Medium
The Vityaz is a military all-terrain heavy amphibious tracked transporter, available in three variants: DT-10, 20 and 30, varying in size and load capacity. It comes with an 800-HP engine equipped with a pre-heater, making it possible to start it in temperatures as low as -50°C. It is considered one of the world’s most capable land vehicles, having outperformed all requirements already in the prototype stage, and being perfectly capable of moving through mud, rivers or thick forest:
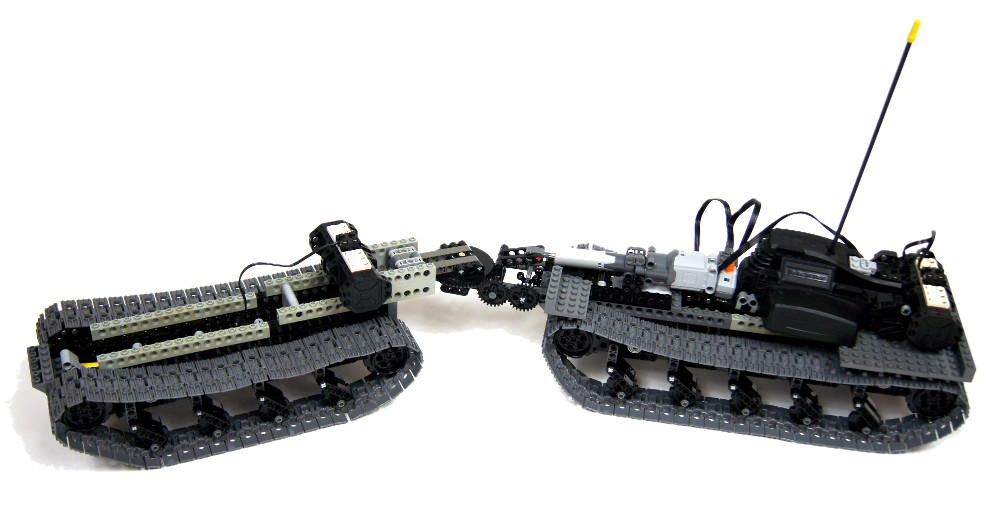
http://www.youtube.com/watch?v=kFFqbVT5UzUThe model was a perfect solution to unleash the combined power of 4 RC motors in a tracked vehicle. The RC units don’t normally allow to steer tracked vehicles in a simple way, so an articulated tracked vehicle was a great option. Designing a model for driving outdoors in winter also solved the issue of the RC motors overheating under load, while the Eneloop batteries I have recently bought promised a decent performance in low temperatures.
The model was designed for maximized performance in deep snow and low temperature. That meant very robust construction, minimum number of details that could become separated or weaken the body, and increased ground clearance. The chassis of the first and second hull were identical, except for the second one being longer by a single pair of road wheels. In each chassis, all road wheels were suspended on shock absorbers independently, and all vital components such as the shock absorbers or the motors were closed shut inside the hull. The drivetrain gearing, on the other hand, was located inside the tracks, so it could be easily changed if need be, and it was doubled on both sides of the hull, to handle the torque better. Each hull housed a single RC unit and a single 8878 battery. The first hull housed a number of lights, while the second one housed lights, L motor controlling the central joint’s angle through a linear actuator and connected to the RC unit, and a Medium motor controlling the central joint’s rotation, and connected to the 8878 battery through a switch. The switch was connected to the RC unit’s steering output, thus making the Medium motor remotely controlled by the RC unit. Thus, the central joint’s angle was controlled remotely in two planes, although other than steering, it proved of little use. The Medium motor was quite capable of steering while the model was driving, but not so much while it was standing still. The central joint could be also easily decoupled.
The model was one of my most robust creations ever, with the hulls so tough that one hull could be put on top of the other (it was in fact the only convenient way of carrying the model around). It wasn’t pretty, but its performance in snow and temperature below -10°C has exceeded all my expectations. The model proved practically unstoppable, moving easily through deep snow, gaps and rough terrain. It only slightly slowed down while driving uphill in deep snow, and that was clearly caused by problems with traction. I have spent half an hour outdoors with it, until my camera started freezing, and the model was still perfectly operational and capable. In fact, it was difficult to keep up with it while filming.
All in all, it was an extremely robust and powerful model, and driving it through snow was a great fun.










@Wyatt
Well, then you should probably read the description.
How did you build the steering system I would like to make one like that.
@Devin Pozdrowski
My whole life, I guess.
How long did it take you to become a great builder?
@Sariel
@Mondo
Surprisingly, “I’ve Got The Power”.
Hi Sariel, what´s the name of the background music?
Could to add 1X2 black pins to the tracks to add traction and increase its speed
Idź z tym na Truck Trial.
Przynajmniej pewne, że w trakcie wyścigu nie zamarznie 😀
@1nxtmonster
No, I don’t have GO Pro.
Do you use a go pro for on-car mounting?
@Reznov
It’s practically no difference.
Hey Sariel,
which one is beter for tracked vehicle, front wheel drive or rear wheel ? Because I think rear wheel tensions the chain much more than front wheel when climbing obstacles .
Ok, so the hulls aren’t supposed to be able to pivot around the back to forward axis with respect to one another. I guess it’s simply the inherent flexibility of the Lego pieces that makes the hulls, in spite of the above, twist a little bit.
@BePPeE1000
Thanks. You are misinterpreting the picture.
Picture 5 indicates that the two liftarms connecting the front hull to the turntable aren’t firmly attached to the front hull. Are you using the rubber axle connector somehow or am I just misinterpreting the picture?
The principle with two hulls connected through a central joint makes these vehicles very good climbers. I’ve just finished a similar model, but with wheels (http://www.youtube.com/watch?v=4IwU1K73zF8). Not modeled after a real vehicle.
Nice work as always. There are a lot of good Lego builders out there, but the combination of advanced mechanics and very good looks of the models is what differentiates you from other builders!
/B
@Mondo
No, I don’t think that will help.
Neither, when I exchange the infrared diod in the front of the remote control?
@Mondo
You can’t.
Hello Sariel, how can I increase the range of the infrared remote control?
The normal range is too small.
@AJ
No, of course not.
Could the real thing steer when the hulls were not connected?
I do have to say Sariel, this is most definitely the successor to you’re Hagglunds BV 206. This model is bigger, faster, more stylish, you most certainly have the power. 🙂 Keep up the great work, but I am sure someone of you’re skill wont have a issue with that. Beautiful model, two thumbs up. I have a question however, the unit in the center that connects the two vehicles, you put a Linear Actuator there, how does it be so graceful when descending from a higher level (like falling down from a pile of books for example)? Linear Actuators don’t budge unless the motor is running to move the Linear Actuator before the Vityaz falls. I’m a bit confused on that feature, but everything else was cool!
@arjan
And it kept going.
Lol, you say it’s build to last, but it lost a catterpillar at 0:41 🙂
@Kwon8429channel
Yeah, I found it.
maybe it is real model – I searched it. but how did you find this cool real model? you knew this?
Really pretty! XD
@jimmy3
A week.
wow this thing is cool! must have took you some time to build it 😛
@Shawn
Leave it loose.
if you built it again, would you have motorized the up/down angle of the joint, or left it loose?
Something I had planned to build too
@Moshi
Not really.
Do you have to tilt the central joint downward while moving if you are about to drive off a platform or cliff?