PF Arm

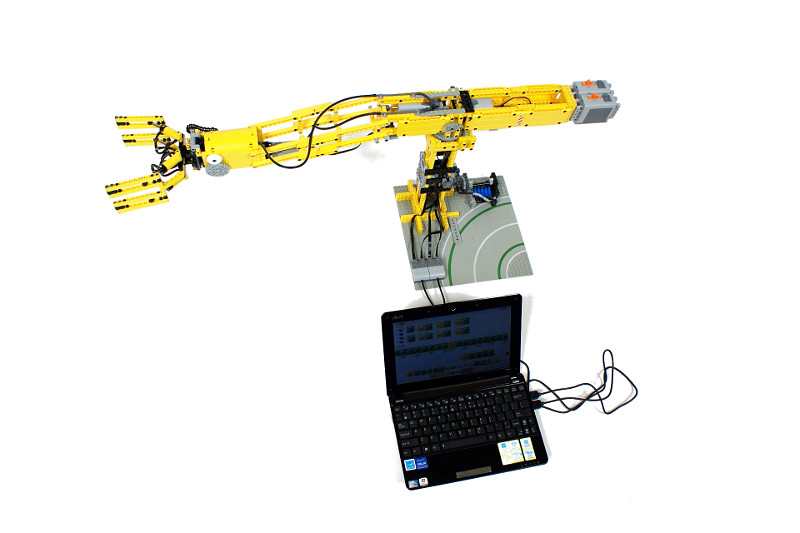
Simple arm with 4 motors, controllable and programmable with the LEGO Education WeDo software.
Datasheet:
Completion date: 19/06/2010
Power: electric (Power Functions) / pneumatic (fed from internal compressor)
Dimensions: height 58 studs / full length of the arm: 113 studs
Weight: 1.53 kg
Motors: 4 x PF Medium
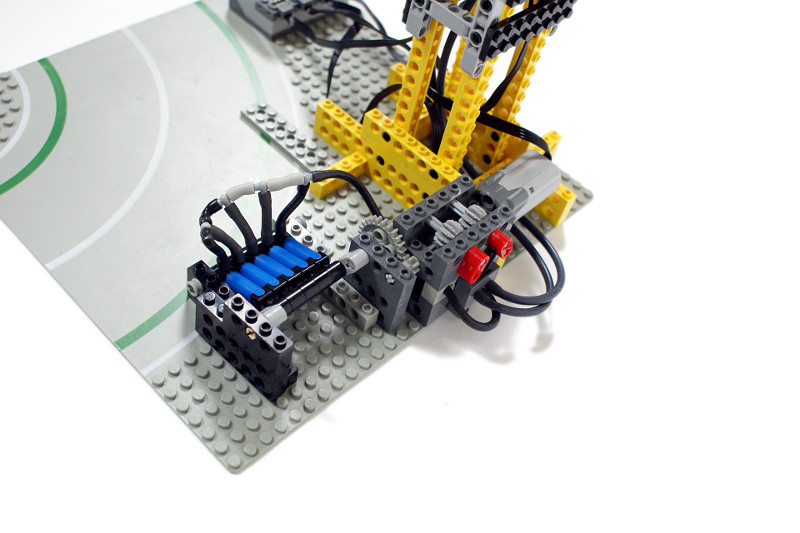
I had access to the LEGO Education WeDo kit for some time, but it was only after I bought second USB hub that I was able to come up with some ideas on how to make use of it. The kit is in a way similar to the LEGO Mindstorms, except it employs the PF system’s components and it needs a computer to be run on. Therefore it is not as mobile as the LEGO Mindstorms with its separate CPU brick, but it’s much more flexible as it needs a computer and PF components that most of the builders already have.
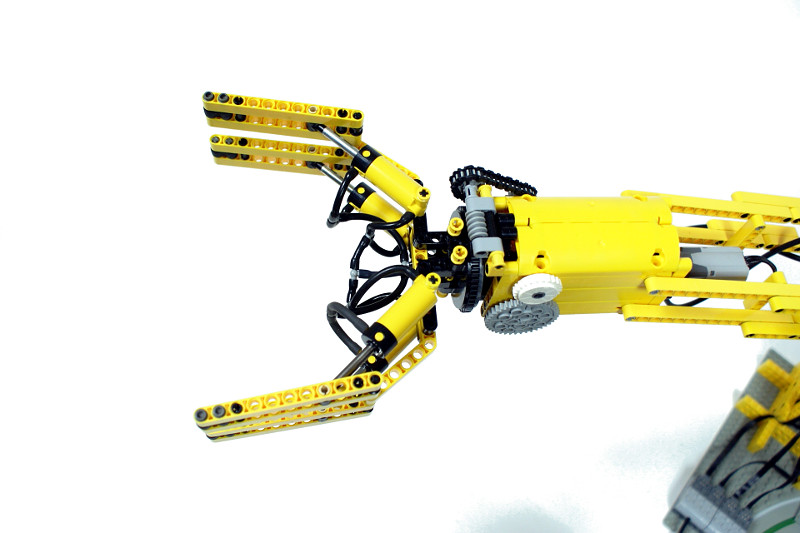
One of the limitations of the WeDo system’s architecture is having just two independent outlets on each USB hub. While it is consistent with how the PF IR receivers work, it also means that you can only control 2 motors/sensors with the basic kit, and up to 6 motors/sensors maximum as the software can control up to 3 USB hubs at once. This is still, however, better than 3 motors that can be plugged to a single NXT brick.
The first version of the arm was built in a couple of hours to be displayed on the same public event as my Caterpillar excavator was. It was controlled by 4 PF switches, to allow viewers to control it manually. It was, however, built with the WeDo software in mind from the very beginning (hence just 4 motors) and after the event I fixed some minor shortcomings and plugged it to my notebook.
It was easy and convenient to control all the motors using a simple keyboard layout as presented below. Basically, there were two keys for each motor, for running it in one direction or another, and there was a single universal stop key. A separate key was responsible for executing complex programs, and I have prepared one such program for the video (it was a time-consuming task due to the need to manually pre-adjust range of each movement).

Another shortcoming of the WeDo software is that it controls motors using a timeout function and not a rotation counter like the Mindstorms do. The advantage of this solution is the ability to use any motor – the PF extension wires make it possible to plug any 9V motor into the PF system and thus to make it WeDo-controllable. The disadvantage is that motors are friction-sensitive, which means that a motor that is run forward and backward for exactly the same time rarely returns to the exact starting position because of the differences in friction it encounters. With the executable programs, I solved this issue by pre-adjusting every movement manually.
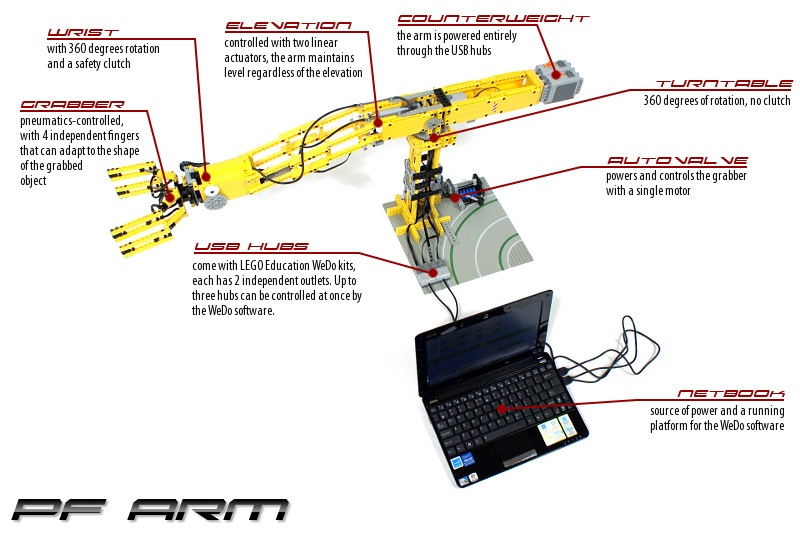
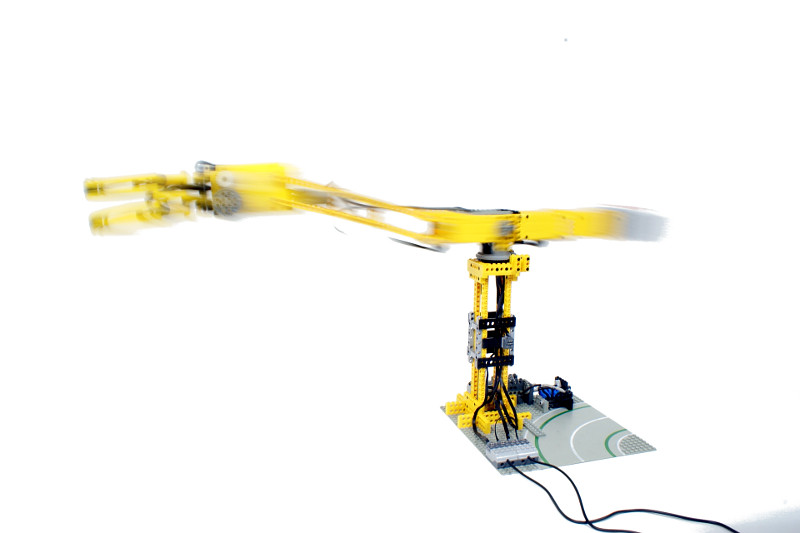
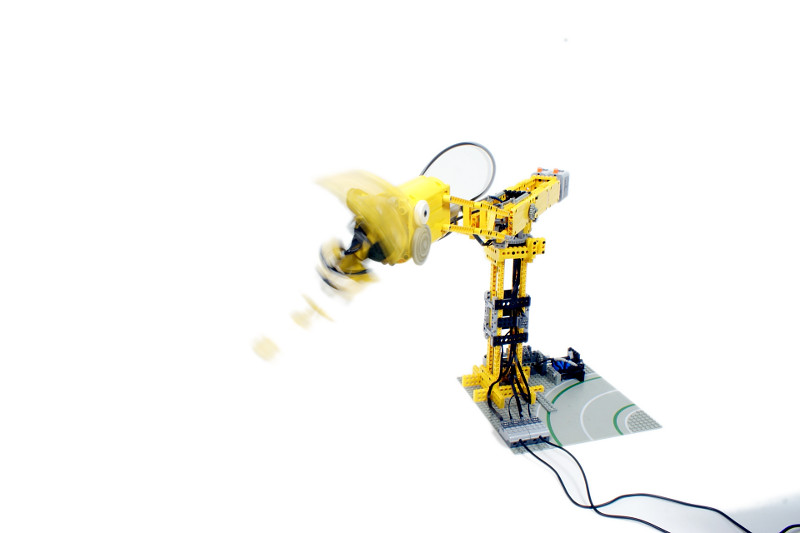
The arm itself consists of a simple grabber with 4 independent fingers, each with a rubber tip for improved grip. The fingers are controlled by an autovalve and thus are capable of adjusting to the shape of the grabbed object. The grabber has a wrist that can be rotated through 360 degrees and uses a safety clutch. The arm is elevated with two linear actuators, with the arm’s level being maintained throughout the elevation process. Two battery boxes are mounted on the rear side of the arm to act as a counterweight for the grabber and its load. Finally, the entire arm can be rotated through 360 degrees by a turntable at the top of the tower it sits on. It felt like something innovative to build, and had certainly a huge potential for various programs and arm’s modifications.
Photos:




Video:
http://www.youtube.com/watch?v=8Sp_x–nUjIMedia reference:
Fascinating LEGO Model Of The Day, Robótica recreativa y educativa (Spanish only)

@nuno2500 if your using wedo you dont need ir control
Dzięki za odpowiedź.
@Mahonii
Nie może się wydłużać. Utwór to “Session” Linkin Park.
Świetna robota! Bardzo spodobało mi się sterowanie przez laptopa (nie mam pojęcia jak to zrobiłeś).
Czy to ramię może chwytać przedmioty w określonej odległości od niego czy może się jakoś wydłużać?
I jak nazywa się utwór którego użyłeś? (przepraszam że pytam ale bardzo mi się spodobał)
Hello Sariel. First, thanks once again for sharing you work and congratz on 2010 roundup. Now a question: Do you know if WeDo can control PF IR? Thanks in advance and happy 2011.
@Black_Omega63
– the angle of the hand is being maintained thanks to parallel levers
– the autovalve can be located anywhere, location doesn’t affect its functionality
– no, small pumps have little efficiency. Three or four driven by a fast motor would be better for the job
– the clutch gear was used in case the grabber hits some obstacle while rotating. It would prevent it from damaging the arm.
– yes, the arm can be rotated by a motor located above the turntable
Hi Sariel,
(Sorry for all the comments) I have two more questions to ask:
1) Why do you need a clutch gear in the grabber rotation mechanism?
2) Would it be possible to place the turntable so that the motor that rotates it is in the arm itself?
BTW, I figured out how the linear actuators work. Sorry again for all the comments.
See ya, Black_Omega63
Hi Sariel,
I got the 8043 motorised excavator for Christmas and I would like to build your arm with the pieces. (Plus my other Lego) However, I have a few questions.
1) How do the linear actuators raise and lower the arm with out changing the angle of the hand?
2) Would it be possible to locate the autovalve in the arm itself? (Like in the empty space on the back of the arm)
3) Would one small pump be enough to feed two cylinders quickly? (Or would it be better to have an airtank and a separate compressor?)
This is an fantastic arm and I think you have done an amazing job with constructing it. 🙂
See ya, Black_Omega63
Bajer do podawania kawy w czasie pracy…
@sam starkenburg
Why don’t you look through my creations to find an inspiration? Each of them has a list of the motors used?
Very nice. Also i respect your work very much and was wondering how big your power function collection is. I have 4 xl motors, 2 m motors, 3 battery boxes, 2 receivers and a remote of each type. Do you have an idea of what i should make, or should i just figure it out on my own.
that’s a tiny computer!
The WeDo kit is very cool, I use the pf system and lego Mindstorms NXT 2.0 kit. You can program pf motors through Mindstorms, it is done through the Hitechnic infrared link sensor. This (with programing) acts as a programmable remote control for the pf motors.
No, I don’t have blueprints for the arm. As for vehicular blueprints, I usually get these from here: http://www.the-blueprints.com/blueprints/
hello, I was just wondering, do you have blueprints for your construction vehicles and the arm? my dad owns a construction company, so you can see that i LOVE construction!!!
P.S. I’m on youtube and always watch your vids (under the username above)!!!!!!
I’m sure you can buy one at Lego Shop or Bricklink.
Thanks for the info.So where did you get the WeDo kit then?
I don’t know if you can get the software for free. It comes with a set for sure. The USB hubs are Lego parts and they come from the WeDo kit too.
very nice i like it more than the arm
Hey man.Nice creation.Got a couple questions.Do you have to purchase the WeDo software or can you download it for free? I still don'[t understand the way you connected the lego motors to the USB.is the hub related to Lego?if it is where can I buy one?
Keep up withe cool creations.Man i wish you started on that lamborghini.
Wow! You could program it to dish out Lucius’ hamster food every day! 🙂 This programmable arm is similar to the robotics one can find in modern factories. Maybe it’s possible to “hack” the Lego WeDo software to allow for more motors to be attached, to give “6 degrees of freedom” movement….
Awesome!