Racing Truck Turbo

Another take on racing trucks. Features fully modular design, return-to-center steering system, full suspension, speedometer and lights.
Datasheet:
Completion date: 20/01/2009
Power: electric (Power Functions)
Dimensions: length 43 studs / width 18 studs / height 25 studs
Weight: 1.69 kg
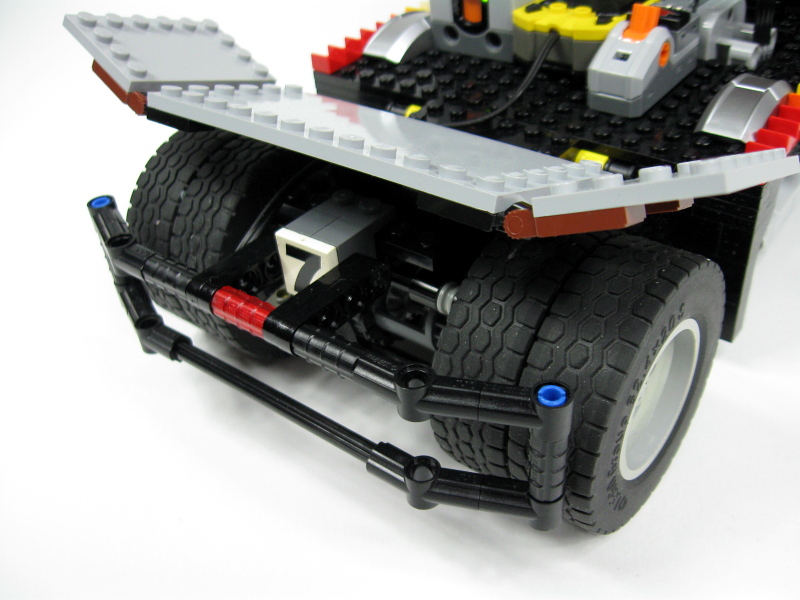
Suspension: front – pendular without shock absorbers/ rear – dragged axle
Motors: 1 x PF Medium, 2 x PF XL
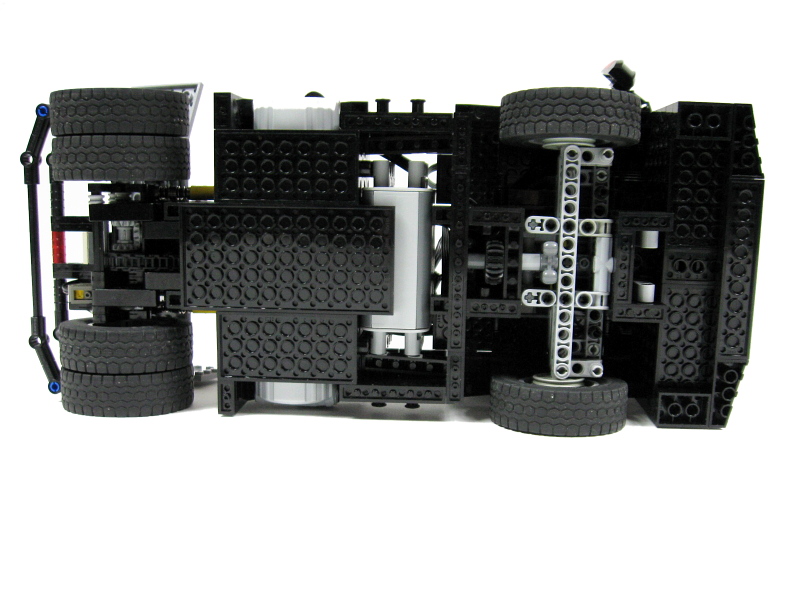
After a long break, I’ve come back to the subject of the racing trucks. I wanted something faster and better-looking than my two previous trucks, something that I could call ultimate in terms of performance. The only way to achieve the latter goal was, in my opinion, a fully modular design. Therefore, the truck was built out of three basic modules: a cabin, front part of the chassis with the entire steering system, and rear part of the chassis with entire drivetrain and detachable battery box. Thus it was quite easy to make adjustments to the drivetrain and the steering system.
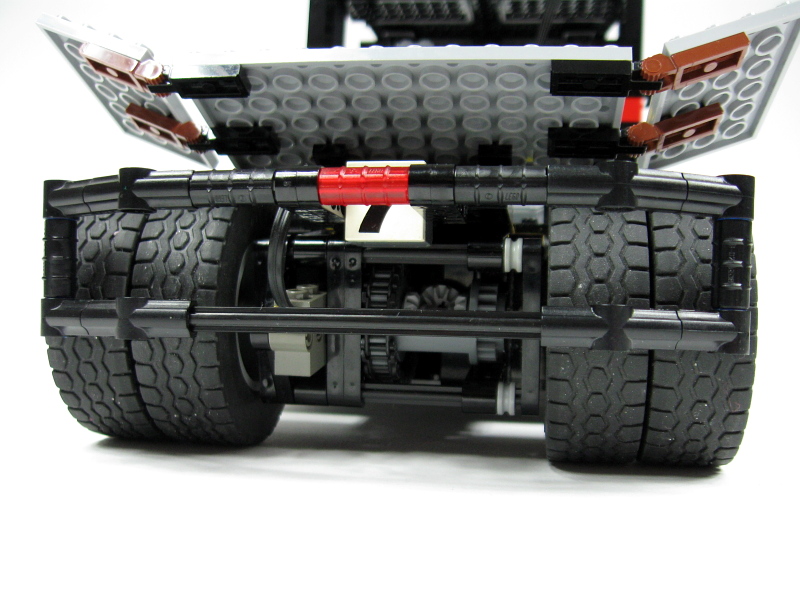
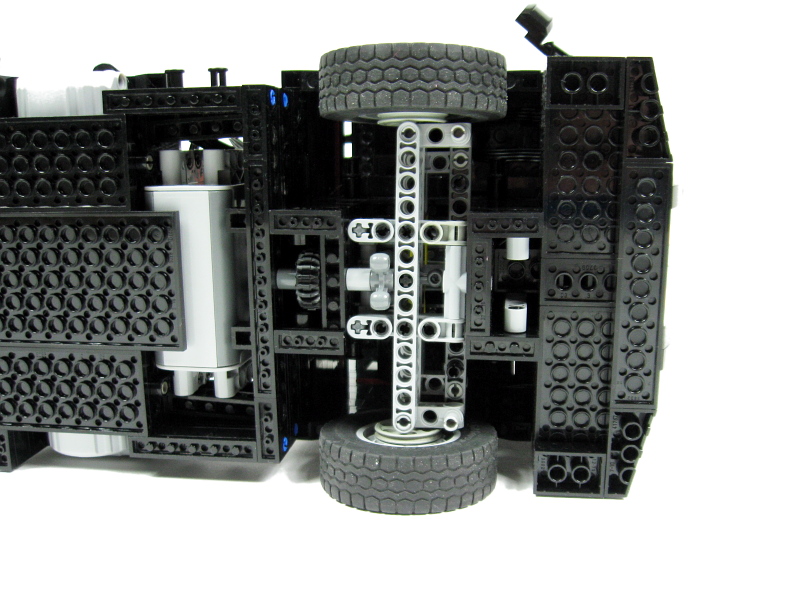
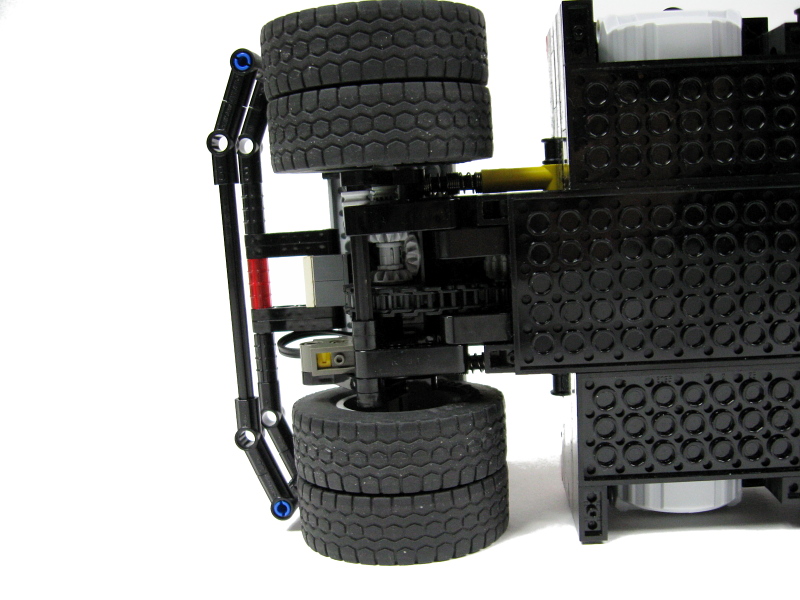
The drivetrain was powered by two PF XL motors connected by a rigid axle (one of them with polarity switched). The rear axle was driven via a small number of double bevel gears, and a chain that transferred the drive to a 4-studs wide differential. The construction of the rear axle was quite uncommon: its structure consisted of several axles and Technic triangles, the differential was moved to the side, and the space gained this way was occupied by a Lego speedometer sensor. The axle was suspended on two stiff shock absorbers, and given a very small travel distance.
The steering system used the mini pendular steered suspension module developed shortly earlier, with the rubber band layout that enabled return-to-center steering. This function lacked some precision, limited steering lock and disabled the proportional steering, but it served its essential purpose.
The modular design involved a single disadvantage – a necessity to locate most of the PF elements behind the cabin, so that they could be easily accessed when e.g. the steering motor had to be disconnected along with the front chassis module. It has significantly degraded the aesthetic impression given by the truck’s cab.
The performance of the truck was way below my expectations. The drivetrain provided excellent speed when the truck’s weight was only a little bit over 1 kilogram, but with the final weight of 1.69 kg the speed was only half as good. After adjusting the gear ratio I was only able to draw close to 4 kmph (compared to the initial 7 kmph of the 1-kilogram heavy chassis). Therefore, despite a number of innovative features and the satisfactory look of the truck, I considered it a major disappointment. It made me think that perhaps the assumed scale of the vehicle and the final weight it imposed were too high for the PF system to provide a decent speed. Certainly a smaller, lighter and suspensionless truck could run much faster.




















@sap
Here: http://www.youtube.com/watch?v=jQ5ug1CwRa8
How do you make the return to center steering? Could you post a tutorial for that? thanks!
thats fine, chuckle chuckle;). by the way your models are great 😀
@LinkDestroyer
Yup. Sorry if I sounded rude.
sorry for the mishap but thank you now i understand
oh i must of read it wrong thank you a lot 😀
@LinkDestroyer
Let me quote the description above: “Suspension: front – pendular without shock absorbers”. It’s not so hard to read, is it?
where did you put the shock absorbers on the steering i cant find them any where??? theres no where to put them that i can see, even on your page for the steering system i still can’t see
@karel
have you tried tightening the gears closer to each other by putting the gears between to lift arms or putting them in a bracing???? also the wheels should return to the centurn when the actual vehicle is moving, because there will be less friction on the steering wheels… hope you found this helpful!
@karel
Just building it stronger and stop bombarding me with questions.
i tried it, but the gears ”slip”. all the tooths miss eachother, what can be done to not have this problem?
what about a stronger band + a gear ratio like 1:1.5-2?
@karel
If you lower gear ratio, the band will be too weak to pull the motor back.
but i actually made this truck to test return-to-center steering…
can’t i lower mygear ratio or something? it’s just 1:1 right now.
but wont those gears slip? i’m using knob wheels right now…
@karel
Perhaps you should try normal steering in this case.
but then it doesn’t turn at all…
@karel
Try stronger rubber band then.
i found out how to do it, but now i’m wondering, when the vehicle is a bit heavy, what rubber band do i have to use then? a strong one, or not? and what about the gear ratio?
i’m having a bit of trouble with it, and i’m making a fast truck to. i have used the same steering system as you do. and i’m using the same rubber band and my current gear ratio is 1:1. but right now, it doesn’t really steers as i want it to, and it doesn’t completely returns to it center.
i mean the return to center part…
none of my set has it… i’ll try to find it out myself then…
@karel
Any Lego Technic set has the same principles of steering, so I don’t know how can you not get it.
could you then make random instructions?
i just don’t get how they work!
just a little design…
@karel
No, not really. It was built a long time ago, and the setup of the gears is very similar to what you can see in the steering systems of my other vehicles.
could you make instructions of the middle part of pic 6?
i know you are using a return-to-center steering construction, and that you already gave instructions to the steering part itself, but could you give instructions to the whole middle part?
i don’t get how you use your toothweels there.
@joalegofreak
Something like 2:1 if memory serves me well.
what is the gearing of the moters to the driveaxle?
OK
@legokid
They are pulled to center by a rubber band. There is a whole post on it in the Ideas category.
hey what I dont under stand is how you get the gears to make it return to center.
@Scott
I don’t know, but I think it could handle that. The chain links have no apparent problems handling two XL motors, and they are cheap anyway.
I was wondering how strong the chain is that drives the differential? I am planning on biulding a race truck powered by 4 xl motors with two battery packs and rather than a brick cab I plan to biuld a lift arm cab and I was wondering if you think the chain links would be strong enough and not come apart? (i dont have the links yet, so this will save me buying them and having them come apart)
@Matthew Evans
I’ve just seen a pretty good car like that here: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=362348
And a smaller one here: http://www.brickshelf.com/cgi-bin/gallery.cgi?i=3391340
I have a suggestion for a new project. It should be pretty simple, but how about the smallest possible rc car using steering.
Just an Idea
thanks
@cdric
I got it from a LEGO 5206 set.
where did you buy your speedometer